I assume you want to implement it with Python code? Signal events can be done with mySignalBehavior.signal(parameter) which can be caught with
triggerCondition(lambda: getTrigger() == mySignalBehavior)
More can be seen here (page 7) where some movement is done with servos:
my implementation of the gripper is already working, when I manually trigger open/close everything is fine!
But where I should I trigger my signals from the robot component (and wait on finishing the movement) that the open/close will always happen automatically after grabing a part and relase a part in process modelling?
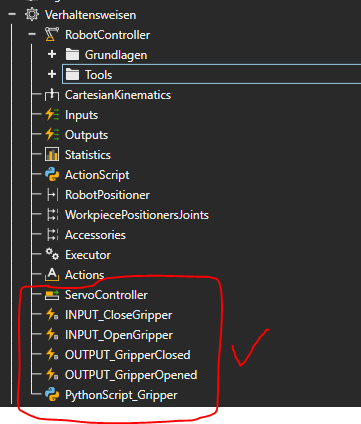
If you’re using PM can you use SendSignal statements as seen in figure 1? They should be correctly implemented if you can manually use them and it works. With PM nodes you could probably send signals to correctly open and close the gripper at the right time.
Figure 1
If it’s possible can you send the .vcmx and I can take a look at it? As of now it seems like you are receiving terrific “Monday morning” tier of help from me. There will most likely be some others here to help you later though.
yes solve it over PM (send- and wait signal) seems to be one way…
But I know that open- and closing the gripper always happens at the grabbing-points! → This is what I want to implement in my robot so that I havn’t do this each time I use this robot in simulations…
I thought about trigger the gripper signal from ActionScript, but there the Grab and Relase in not in the OnRun-Method… -_-