Hello,
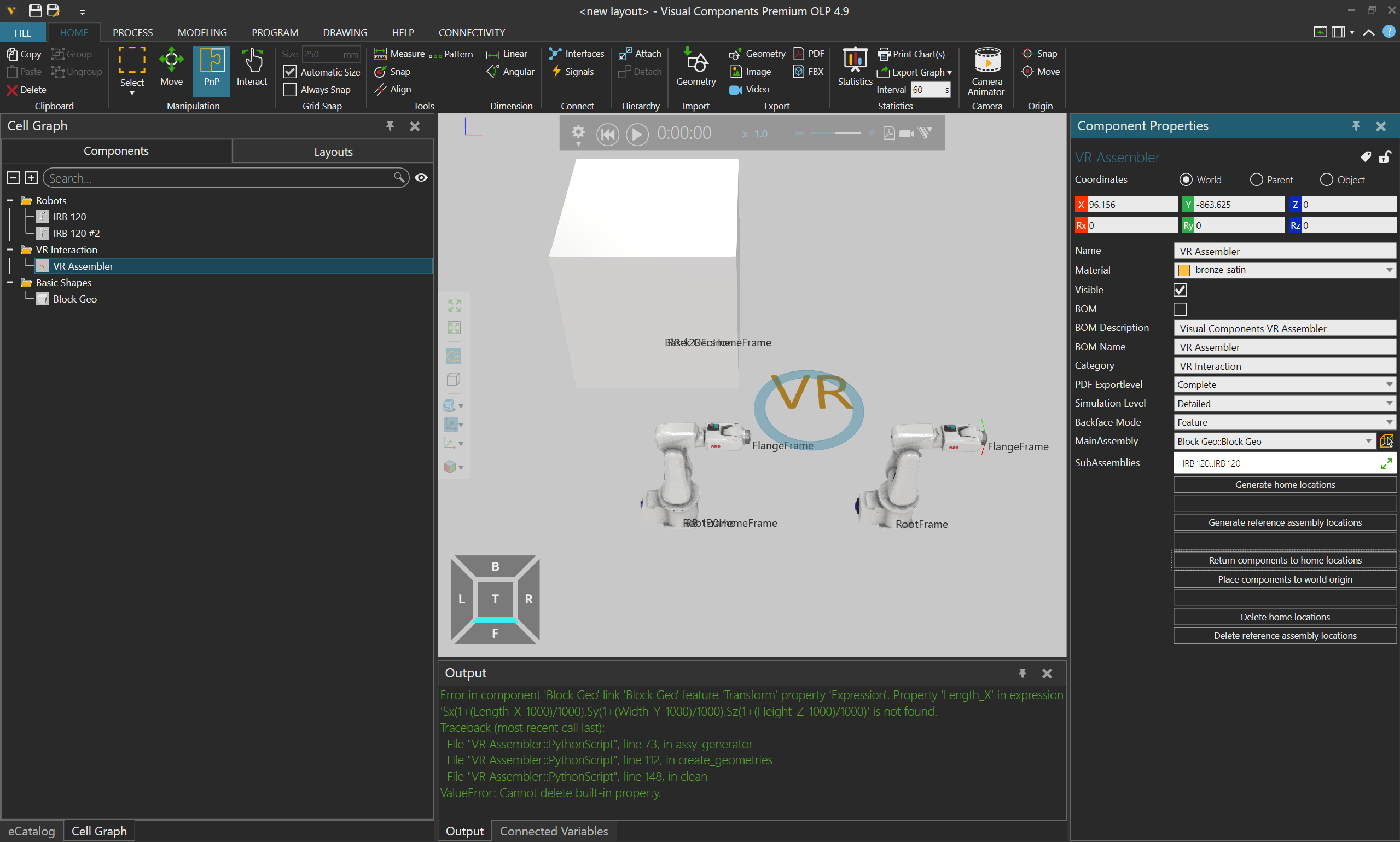
I want to assemble a robot component with predefined joint attribute behaviors using a controller in a VR scene. I set the home locations and reference assembly locations in the conventional way, but a second identical robot appeared at the coordinates of the RootFrame. Each time I reset the simulation, a robot component is generated at the reference assembly locations. I wonder how to assemble this robot properly.
Thank you.