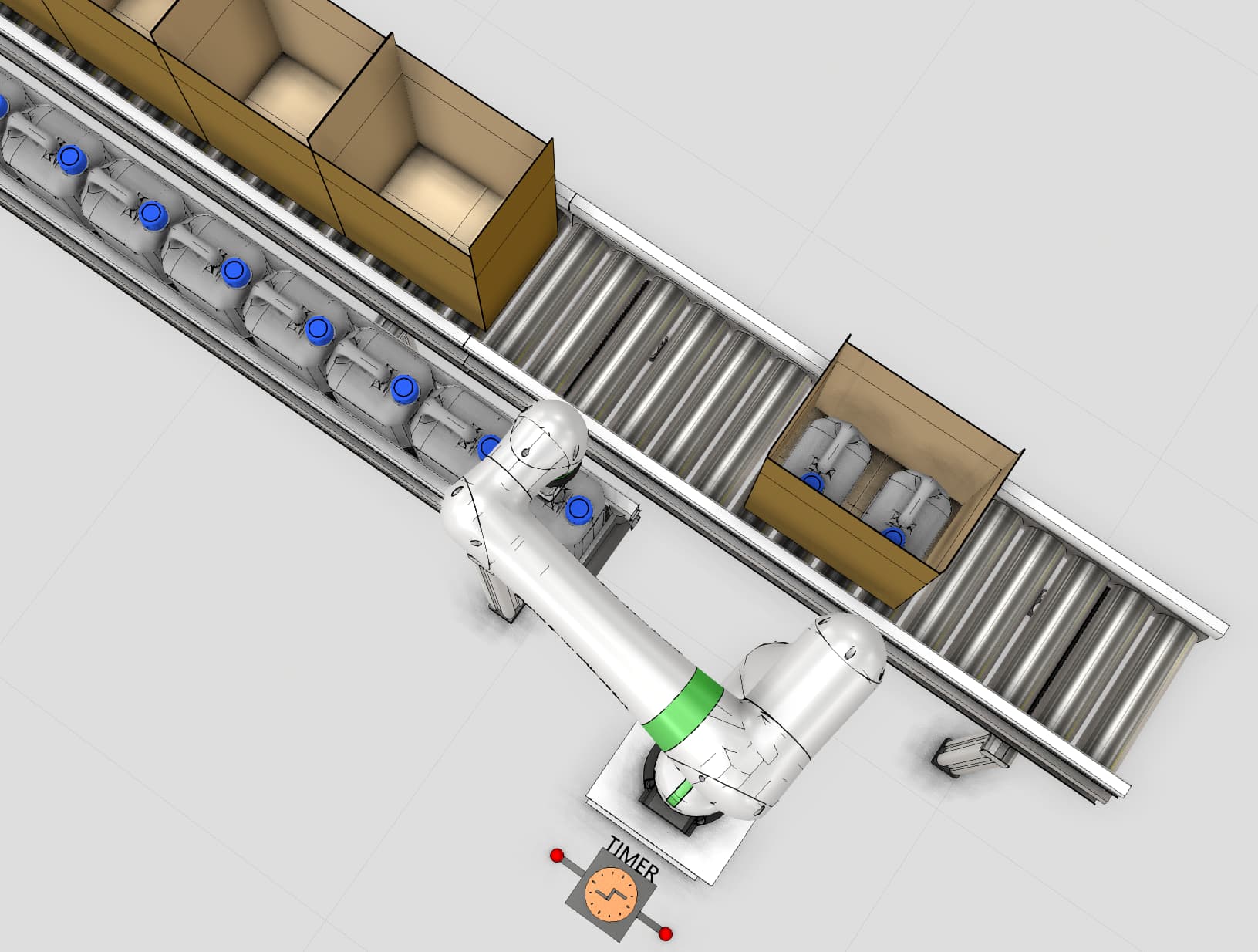
I am looking for some guidance on the best way to create this process. I have been trying on my own (and watching some lessons), but still can’t find the best way to make this happen. For this application, I create a box and I want that to stop and wait for the robot to place 2 parts inside, and then for it to move on. I know there are a number of ways to handle this process: it can be based on time, or a signal (when the robot finishes its process). Right now I was just trying to use a timer - stop box for X seconds, then release.
I was hoping not having to make an assembly and just let the parts in the box and box convey away (as one).
I would like to have a simple setup, where I can change the size of the box, and what I am putting in it using this same concept.
You could use the Bladder stopper instead of the Conveyor Sensor (also from the Conveyor Utilities). It can stop a product during a delay, or stop part until you send a signal
Thanks - I think that will work, but it looks like I need to create an assembly. The way I am doing it, the bladder grabs the product I put in side the box and everything backs up.
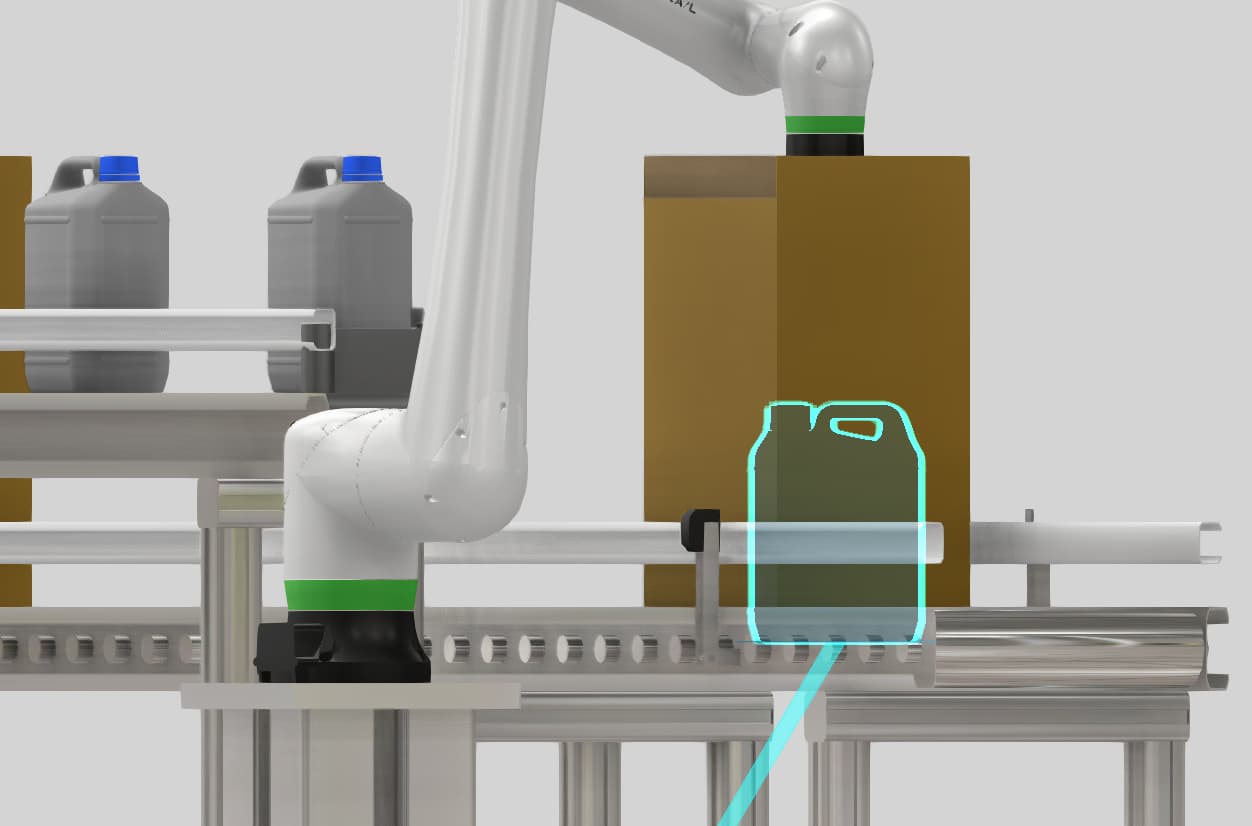
The fact that the products are not staying in the box is another problem that you can solve without having to create an assembly. When the robot places the product, it’s a bit too low at the moment, so the product is attached to the conveyor and not the box. You should also adjust the Gravity Direction.