Hi all,
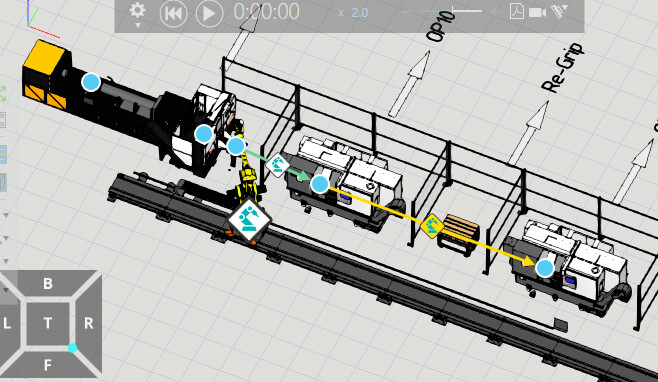
Please help to understand how i can move a robot on the linear guide ( 7th axis ) as shown in the screenshot below using process flow.
As you can see i want pick the component from machine 1 where i have used a process feeder node to generate the component and then using the robot to machine tend the remaining inline process as shown in the screenshot the robot shoud be able to shuttle right from process one till the very last inline process
- i have used a KUKA KL4000 robot positioner (please recommend any other if you think that would be better to use here)
- also after attaching the robot controller i cannot mount the the robot with the controller to the robot positioner the green attachment arrow does not appear ( please let me know y)
- Another question is how can i use a gripper with the robot when using Process flow, i dont know how to do it.
would really appreciate any help!