The pallet would need to contained in the link, so when the link is moved its child objects are moved with it. Make sure the pallet is in container behavior, etc. that is in your link.
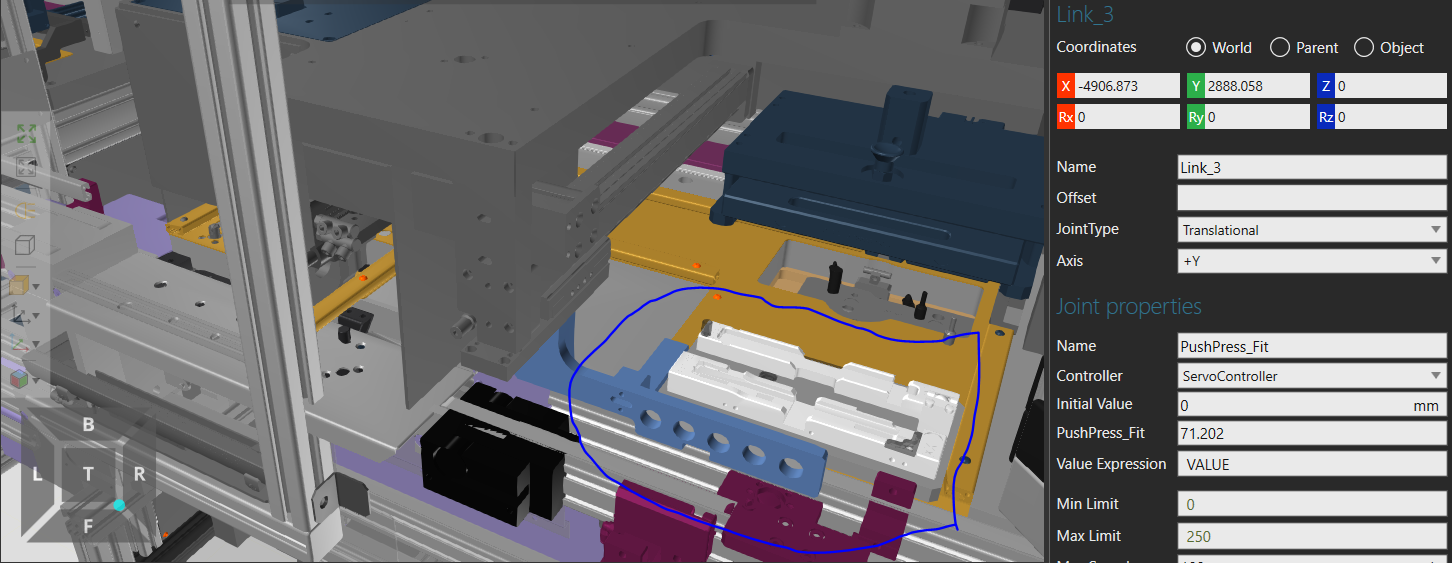
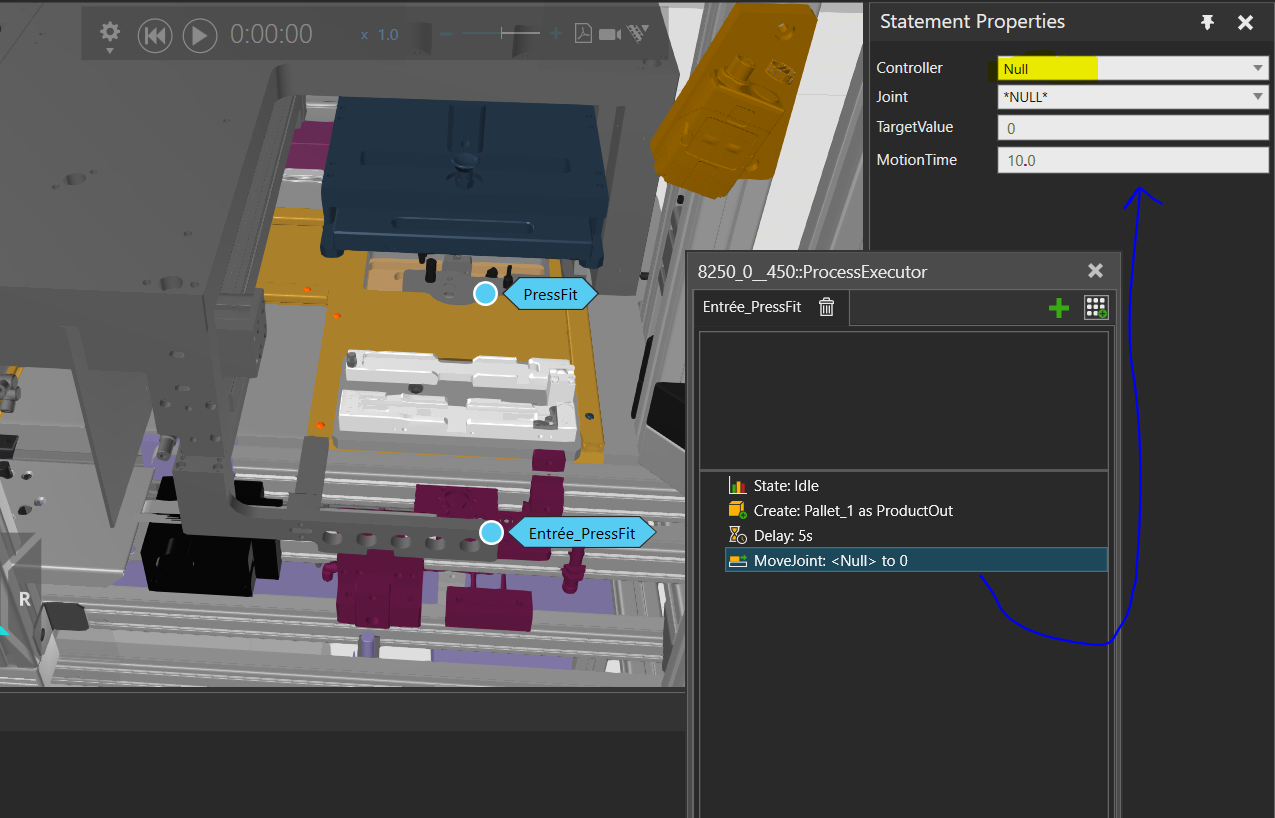
If you meant the Move Joint statement in process modeling, reference the Servo Controller, etc. to move a specific joint to a needed value.
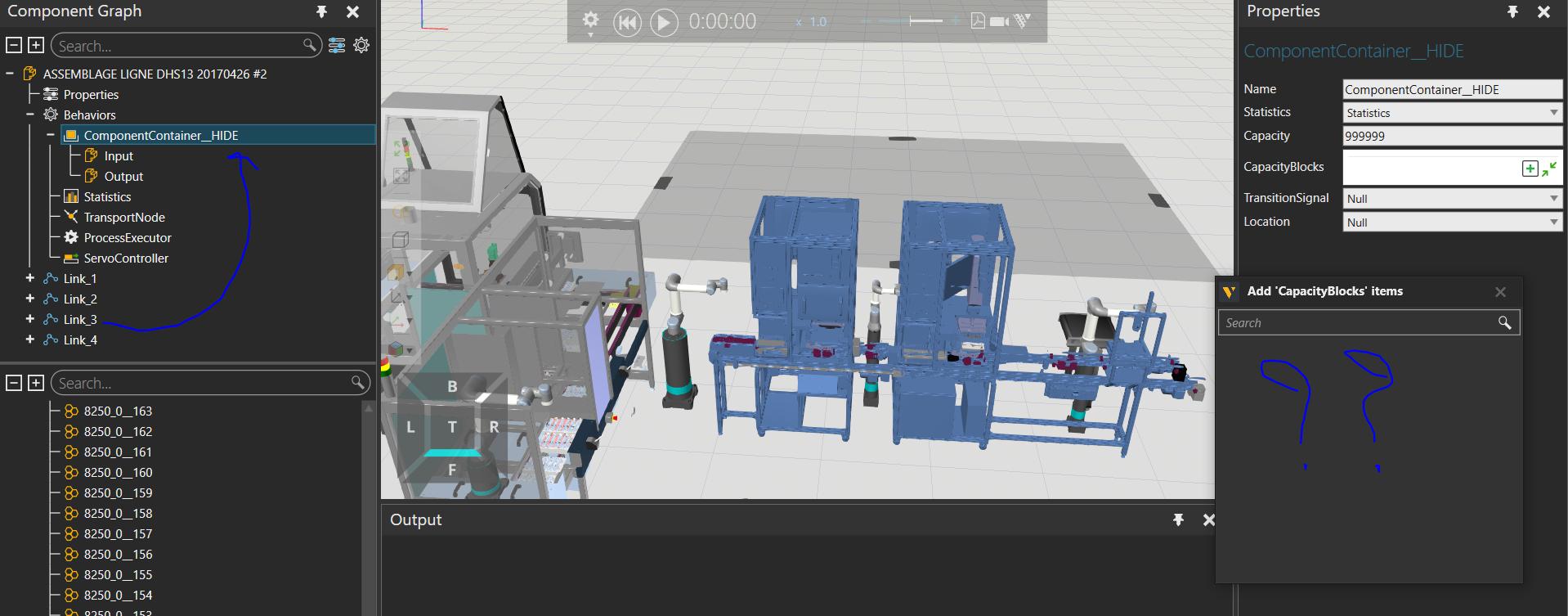
I do not remember if there is a rule or something documented in help file, but try putting the Component Container behavior in Link_3, i.e. drag and drop it there. Make sure that Component Container is used by the TransportNode. I would assume you defined the pallet as a product if you intend to use process modeling.
About the Controller property, are you saying that when you click the Controller dropdown menu the ServoController behavior is not listed there as an option?
I dragged and dropped the Component Container in Link_3 but it doesn’t work and it’s sure that the CC is used by the transportnode. Is there another way to do that ?
Yes, i am saying that the servoController behavior is not listed as an option ; I think that i have correctly added in the behaviors the Servo Controller.
PS: Can i create more than one transportNode in a Component ?
If yes, do i need to define a ProcessExecutor for each TransportNode?
I have no idea. I guess in theory component can have multiple transport nodes and one executor to do what is needed, but consider an approach that works for you. I tried to do something of this sort but not sure what would solve the puzzle, and I purposely avoided doing any scripting, routing rules, etc. Test - Believe In Yourself and Reach For The Sky.vcmx (191.8 KB)
To keep it simple, you could try to use PM components in the eCat as example. For example, this test layout is based on the inline process component. It is tedious in a way to prevent parts from coming in and waiting for parts to leave before moving the joint, but then again is a design question to me if the executor should actually be responsible for this or to just send a signal. Test - Then Again Better To Stay Grounded.vcmx (136.7 KB)
I don’t know enough about PM, so others know better.