I´m new here and I have a question regarding robots moving links, I haven´t found any topics about it here, I hope you can help me
I have a robot with a tool and a conveyor that has several links with different joints. This links can be turned up at 90° to open the next layer of the conveyor.
I wanna do the following thing right now:
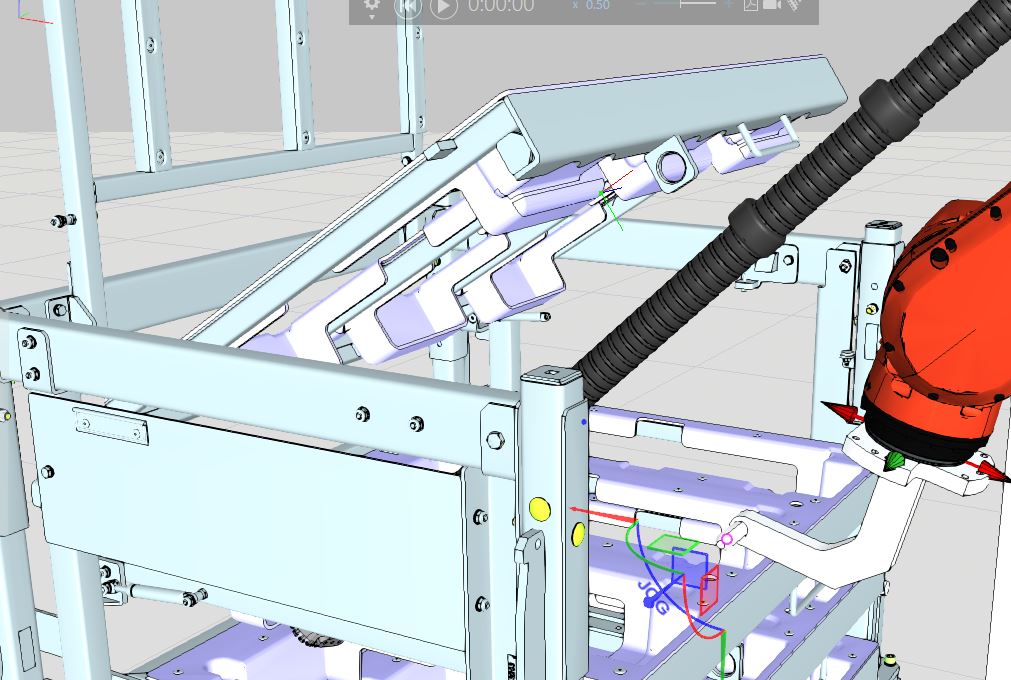
Robot moves with it´s tool in the eyelet of the first link (see picture)
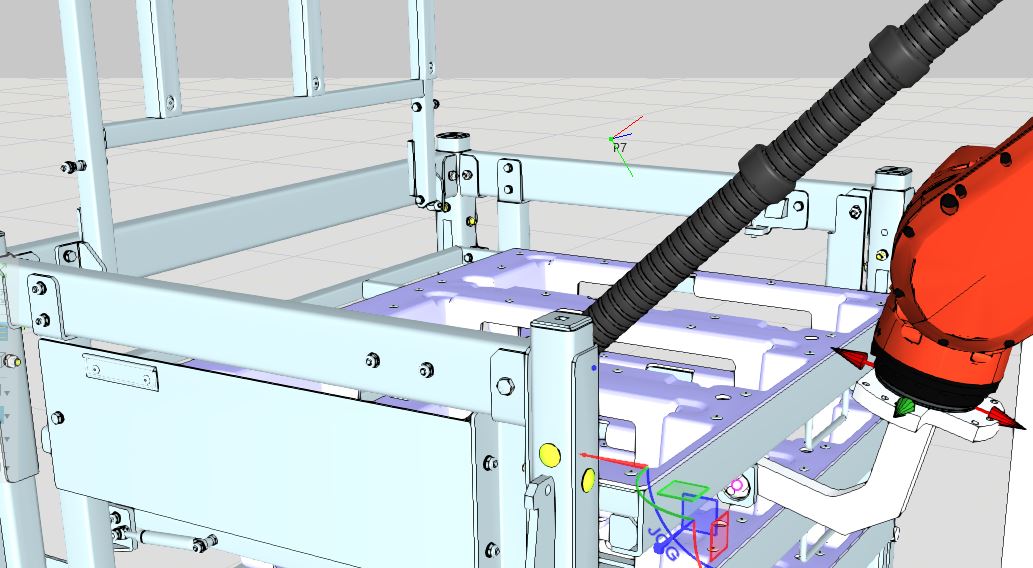
Now I´ve created the path for the robot to turn the link around the joint (see picture 2)
My problem here: The joint (first layer) is not moving with the robot. I know that I can create a servo control to move the joint, but that´s not what I wanna do.
I want to have it realistic, that the bolt of the robot tool is touching the surface of the eyelet and the geometry of the link is moving with the robot tool. I just want to have it realistic, that the link is doing what it would do in reality.
I hope you can understand and help me, I have no clue how to do that.
VC doesn’t really have support for such kinematic interactions where joints move based on some constraints. The kinematic structure is just a tree and anything else needs to be modeled using hand-written joint value math.
You could try doing it with the physics engine but likely it will cause a bunch of frustration, especially if your geometries are not made of simple convex meshes.
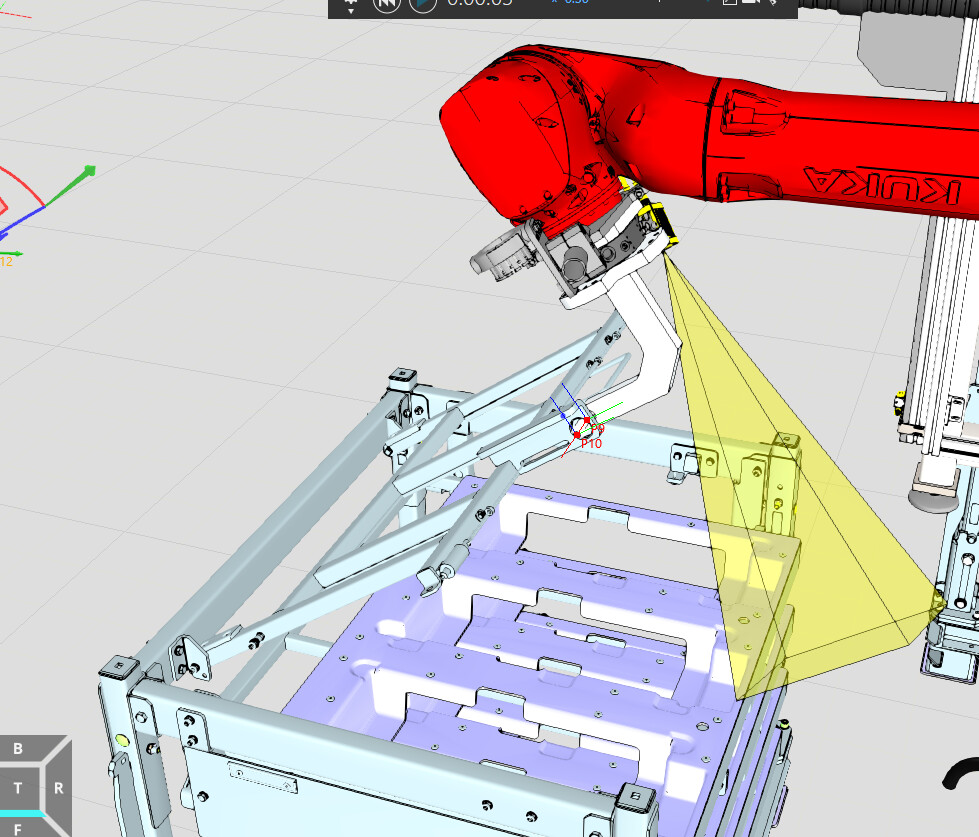
It is working but the top position is out of the reach. Within the motion of the joint my robot tool has to turn around the red axis, around the bolt in the eyelet…
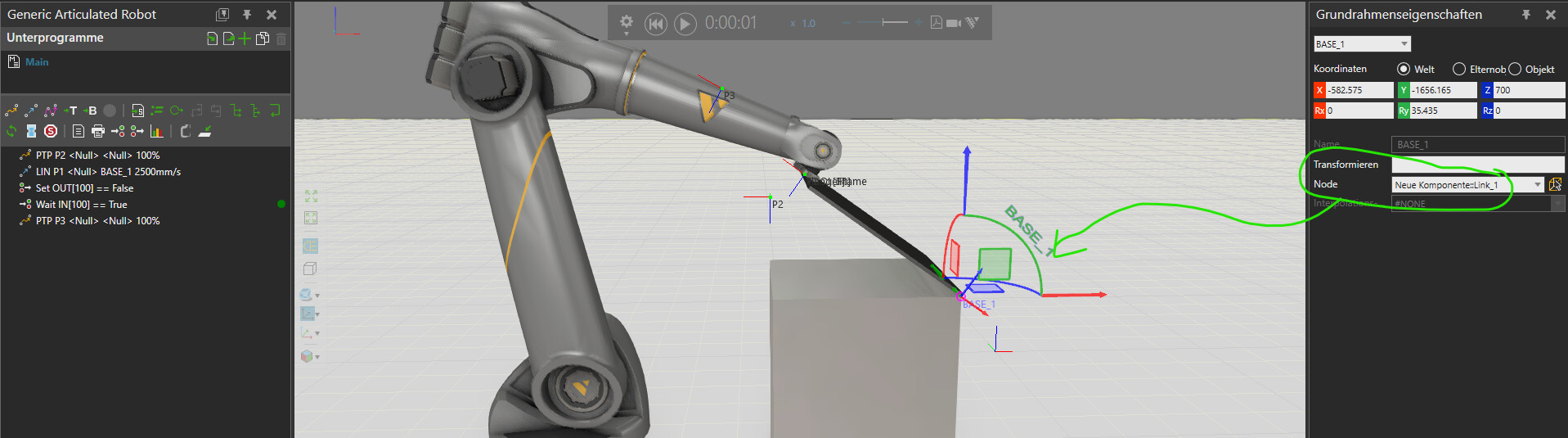
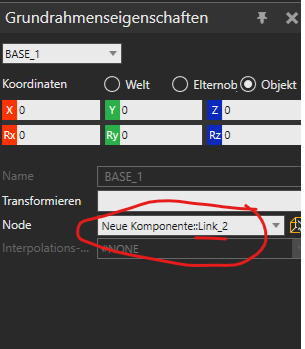
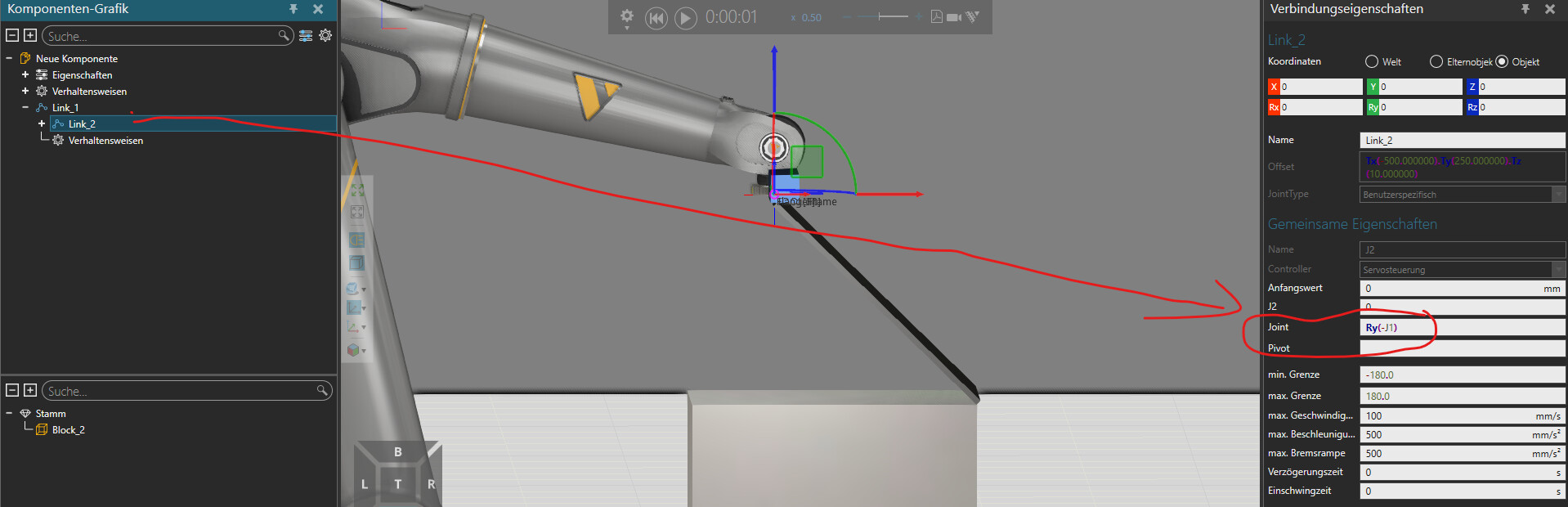
you could create another link and the base is attached to this:
the second link is in the first link and could be defined as follows - custom-jointType. See the feature block in the link is always horizontal. Consequently, the mountplate of the robot is also horizontal. compare the position of the mountplate in the following picture and in the picture from my first post.