Hi guys
I’d like to know how to move the robot grip point to the edge of this PCB.
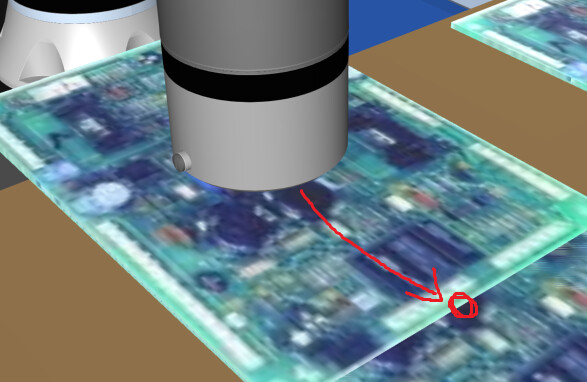
I’ve tried Snap/Move tool to move the point.
Hi guys
I’d like to know how to move the robot grip point to the edge of this PCB.
I’ve tried Snap/Move tool to move the point.
Hello,
Do you want to make the robot pick the plate by creating a robot program it in the program tab or with the Process Modelling (robot on a Robot Transport Controller) ?
Process Modelling for this case, thanks.
Then you could either use the method of Record/Execute Routine, which allows you to record the robot movements as a robot program and modify it. You could the modify the robot position in the program.
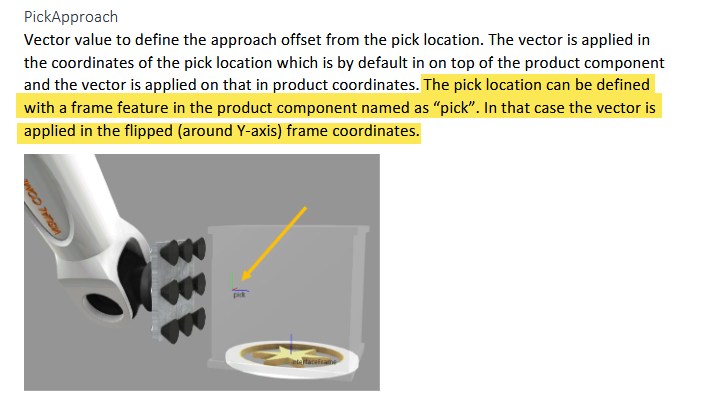
Or you could add a “pick”-Frame in the component, where the robot should pick the product
(see Robot Transport Controller manual page 20)
Yes, it works now, thank you so much.