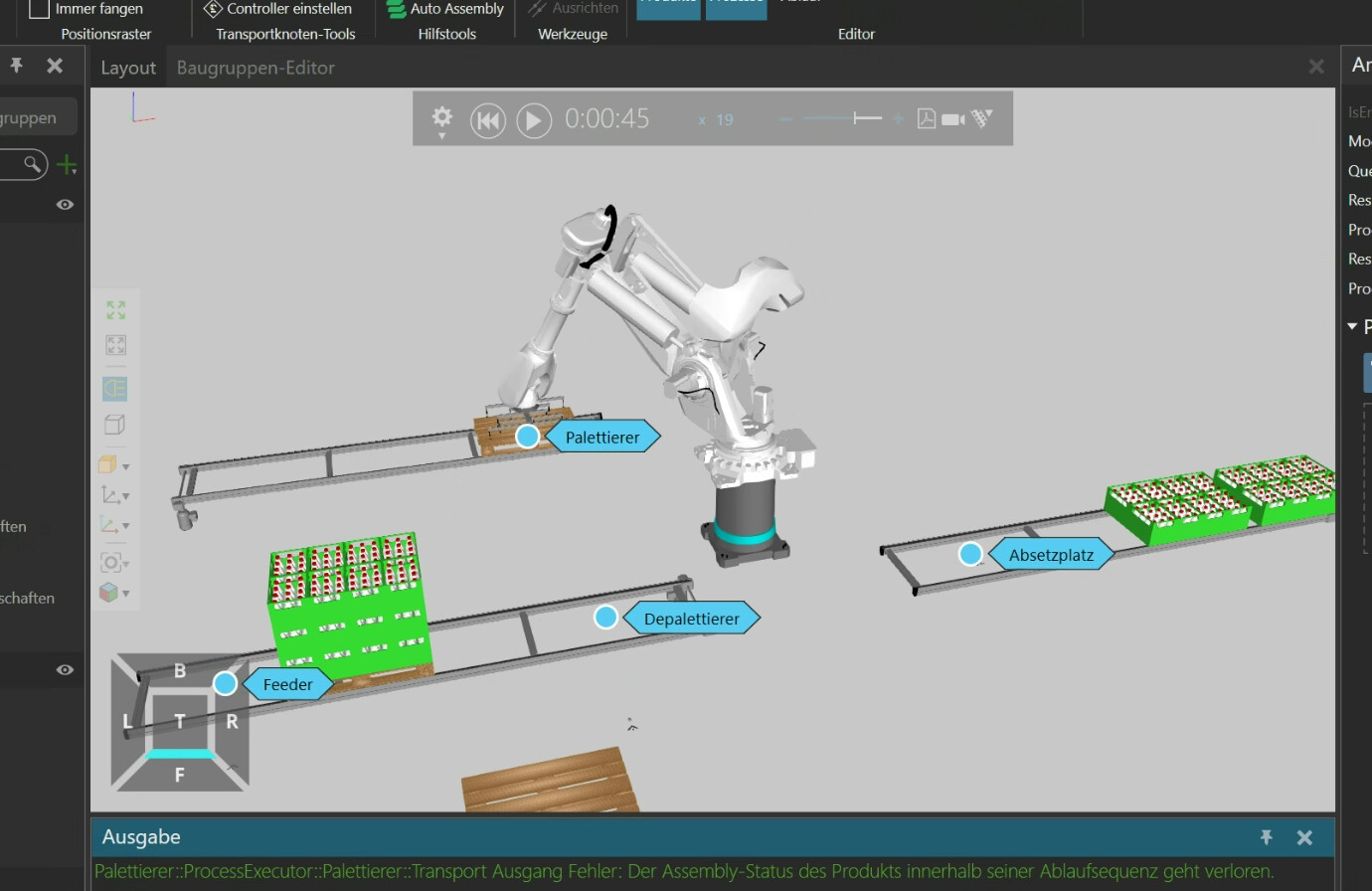
is there a way I can say the robot via process modelling to move to the next pick position even if there is nothing to pick yet, for time optimization?
Like in that picture the robot places the pallet and waits there in the approach position until the pallet is in the process node and sends out the task. I would like to move the robot back to approach the full pallet after placing the empty pallet.
Anyone knows how I can do that with process modelling?
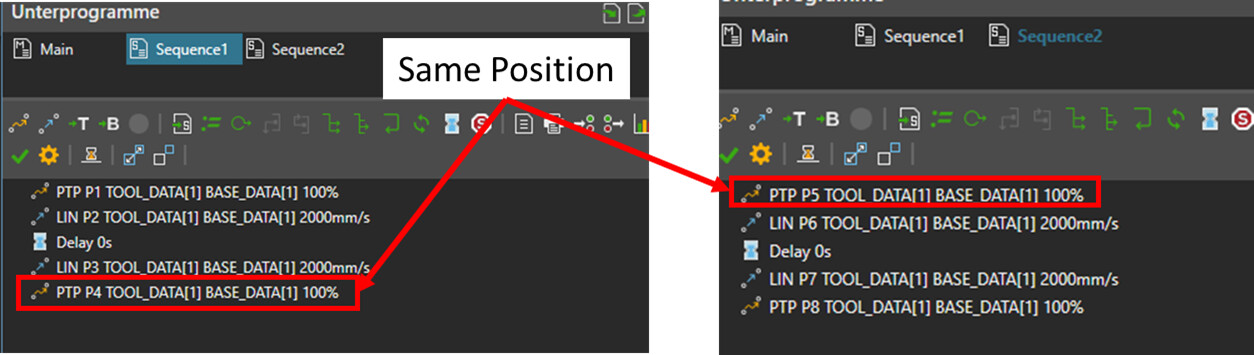
With this i was able to pre-position the robot.
This solution is not the prettiest and only works if the sequence of the routines is always the same.
As soon as the sequence deviates from the standard, i have no solution.
if the approach position you need is always the same, you could also save it as initial position and enable the AutoHoming in the Robot Transport Controller Properties.