I am using a Mission Controller to control two mobile robot resources. Each mobile robot resource has a joint called J1.
In my mission statement, I would like to use MoveJoint to actuate J1 regardless of which mobile robot resource is running the mission.
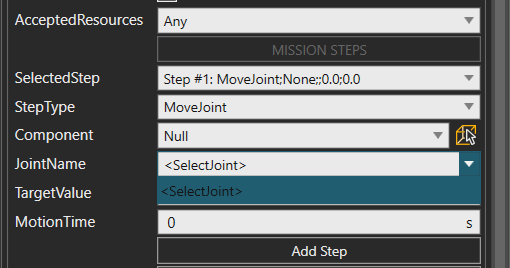
According to the mission manual, I should set Component to null to control the resource’s joint:

However, when I do so, the J1 joint is not an option in JointName:
Both mobile robot resources and the mission controller are interfaced with the Mobile Robot Transport Controller.
Any ideas?