Hi guys. Im new here and got a question. Is it possible to move an object once grasped by a robot tool? I have created my own tol from an imported CAD file, and want to simulate this situation:
I got a robot tool with vacuum gripper mounted on a cylinder. Therefore i want the objects to move along with the suction cups, when i move these with the cylinder. My thought was, if i can link the tool frame which i use to grasp the objects, with the movement of the suction cups somehow?
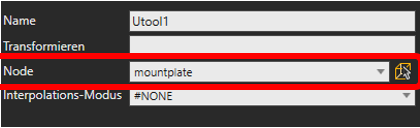
Yes it’s possible, you need to link under tool properties your tool node with right joint that you already made on gripper. For example with J1 that makes zylinder stroke in Z direction.
Tool properties are in robot program to find.
1 Like
Thx for the help, works great now