Hi guys, I´m currently working on a Simulation. I want to dismount a gripper an mount a different gripper, i watched a tutorial https://www.youtube.com/watch?v=OsxlazzAXss, but I have a Problem because my program Editor Looks different. How can I use the subprograms for my Simulation.
Thank you in Advance!
You are using KUKA.Sim and not Visual Components.
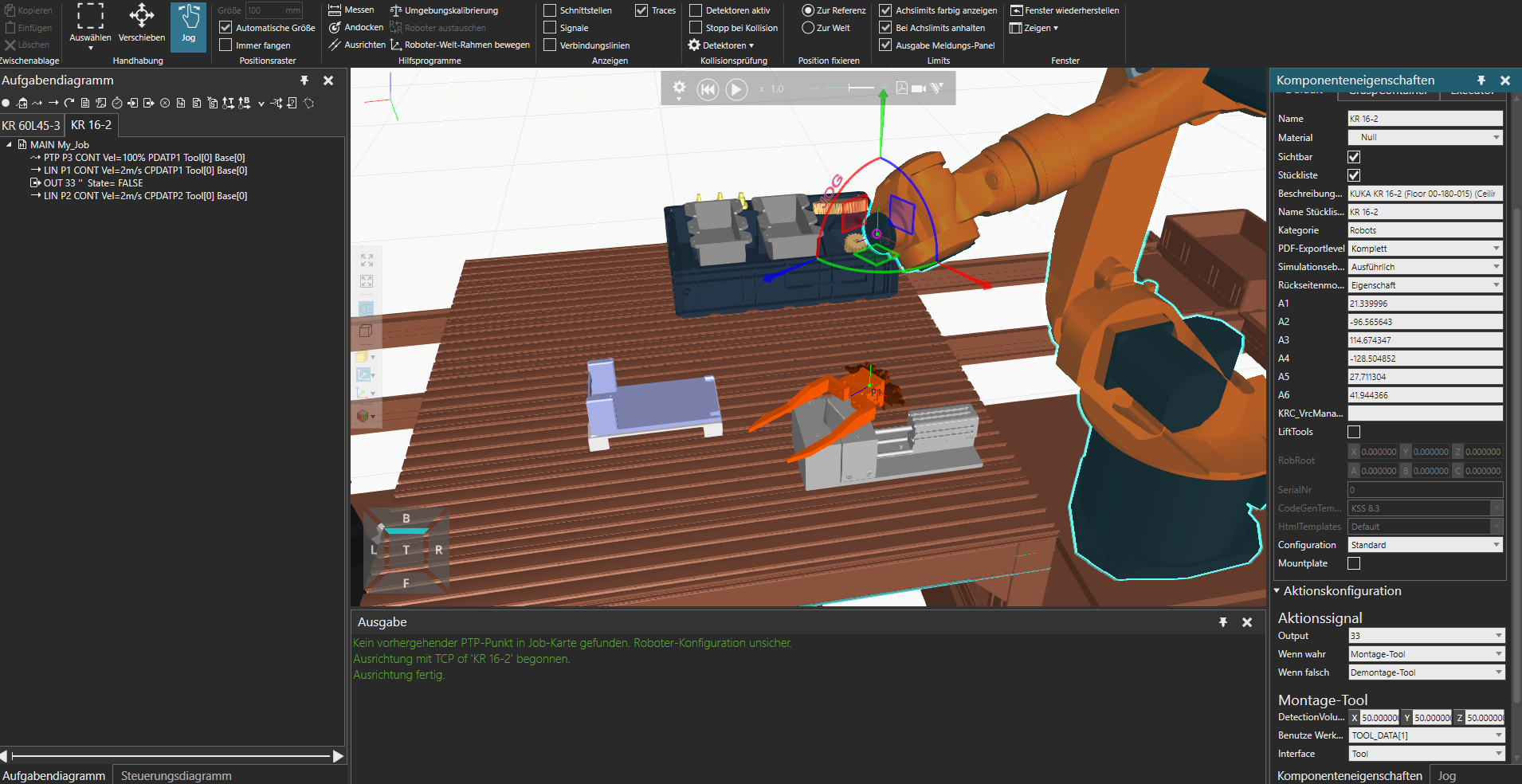
In KUKA Sim Pro 3.x, the Job Map panel, Statements toolbar, there are two statements for subroutines. One statement adds a subroutine. Another statements calls a subroutine. There are also two other statements to wait for input and set an output.
After adding a subroutine, you can call it in Main routine. Use a Set Output statement to trigger mount and dismount of tools.
About asking KUKA.Sim related questions in this forum, keep it VC related if possible. If there is another forum like https://www.robot-forum.com/ that has a section devoted to KUKA.Sim I can try to help there.
1 Like