Hi everyone!
I am trying to see the speed and acceleration of the joints of my ABB robot but I can’t figure out how to do it. ¿Can someone give me a piece of advice please?
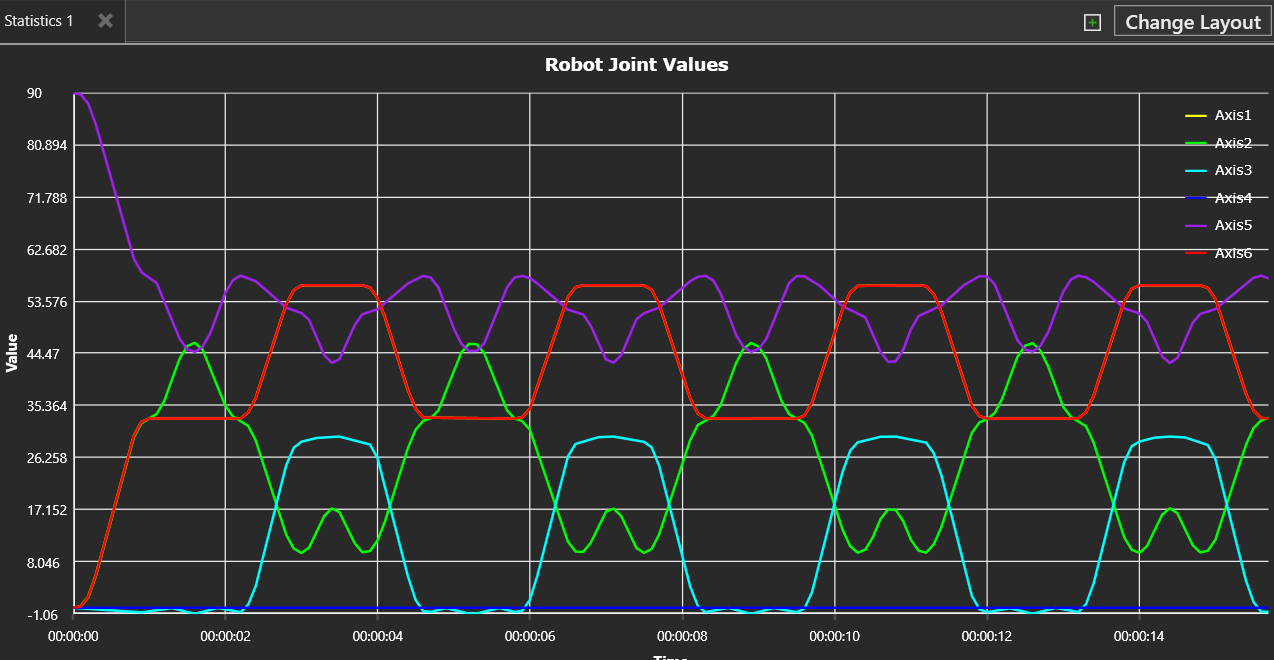
Also, is it possible to plot the values of speed and acceleration and show them in the statistics display? (Same way as the joint values can be shown(see image))
Thanks for the fast response.
I undestand that motion planning is different for each manufacturer. However, I saw that in VC the speed is calculated somehow (since the program prints out a warning on the output panel saying: AxisX exceeded value limit of 50), so, even if it isn’t that accurate, is there a way of getting those values?
I thank you once again.
@avicente
I made something like that a while back, but I can’t find it.
Anyway, if you go into the eCatalog and right click on the left side to enable “Show Deprecated Components” and then search for “speed acceleration check” you will find a component, that can give you speed and acceleration warnings. You can take the script from this component to build something for yourself to calculate speed and acceleration values.
As @TSy pointed out, those values won’t represent real behaviour.
I intended to get those values so I can delimit the accuracy of VC when calculating the total cycle time, since it is one of the main conditions of my layout. What a pity that you couldn’t find what you did, it would have been really helpful, but I’ll try out the “speed acceleration checker” you’ve mentioned. Also, if the speed and acceleration of the robot are not really accurate in VC, would that imply that the cycle time isn’t accurate either?
Cycle times in VC are only estimates. Robot models are modeled to have real speed characteristics for joints but the acceleration is not accurate because VC robots don’t have dynamic model. That is the joint always accelerates the same way regardless what the load is. So for example joint 1 accelerates the same with extended arm and contracted arm and this is not the case in real robots.
So, to get out of doubts on this matter, if the VC robot models don’t have dynamic model, does that mean that even if I set the mass, centre of gravity and moment of inertia of the tool or the product I’m palletizing, the programm won’t take them into account in order to calculate the movement and time cycle?
I see. But then, what are the mass properties of components for and when to use them?
Also, you mentioned that speed characteristics for joints do have real values, but when I activate speed limit warnings, it constantly prints out that I am exceeding the speed limit. Does somebody know how to limit maximum speed for movement? I thougth that it was done automatically in the modeling tab, where limits of axis are set.
Motion and limits work a bit like on KUKA controller. There PTP is limited by joint limits. LIN is limited by cartesian limits but if you set motion speeds too high then you might exceed joint limits. KUKA controller would throw an error here and stop motion whereas in VC you may just print the warnings or choose to stop to sim. So you would need to lower LIN speeds and accelerations manually to not exceed joint limits.
Note that for example ABB controller (and KUKA with SLIN I think) works a bit differently with linear motions and controller itself caps the motion speeds if they get close to joint limits.
Not sure if you still need it, but I found the scripts. You can just copy paste the content into a components PythonScript behaviour. Both scripts will create properties in the component which you can select in the graphs. One script is to track the tcp’s and the other the joint’s speed and acceleration.