because I need to rotate a table to 90 ° everytime I product is grasped inside and a second robot will pick up the product when the table 's rotation equal to 180.
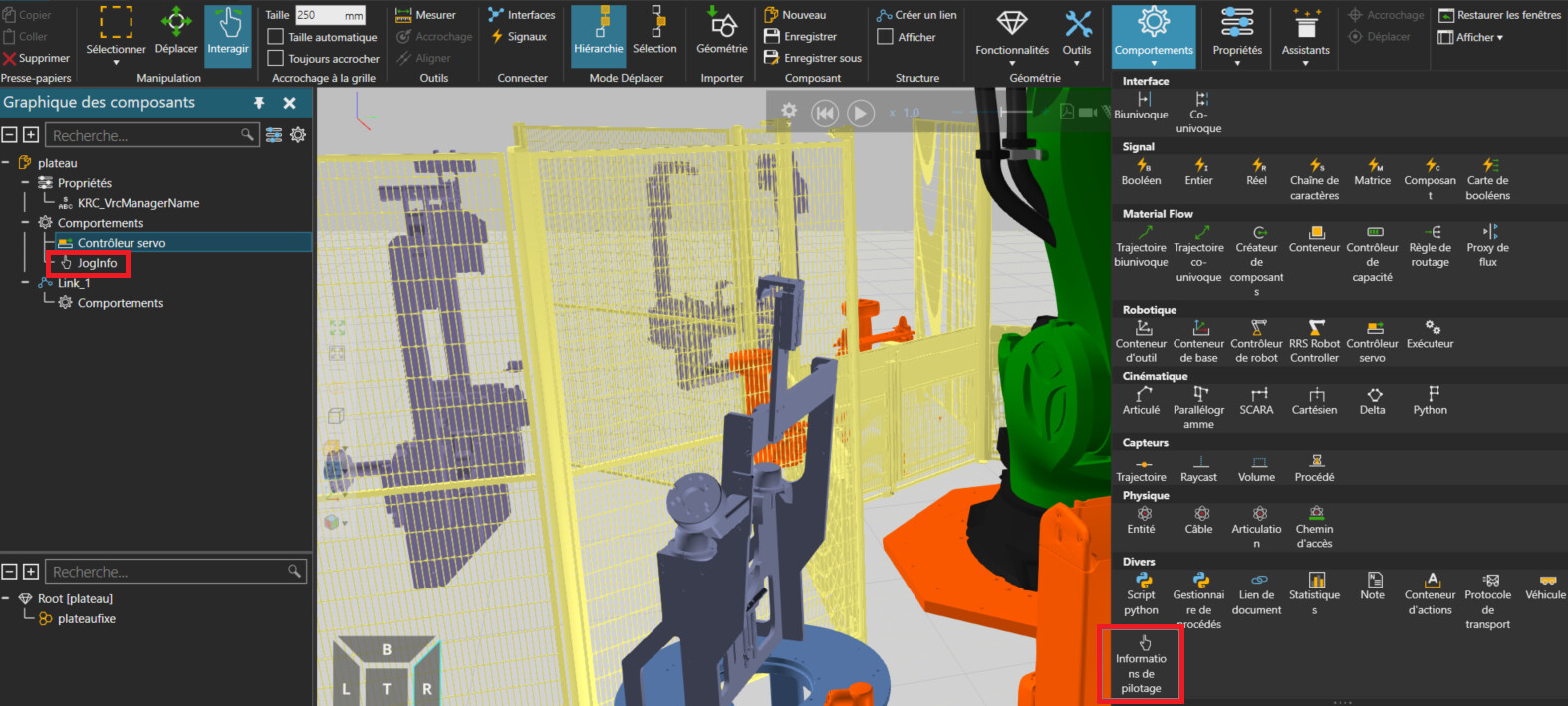
Anyway I see inside the behavior’s option the articulation J1 with its rotation limit and the value of the current rotation.
Is there a simple way to connect this J1 real number to a variable, instead of going through a python script. Then inside my simulation I just set this variable J1 to 90°,180° …
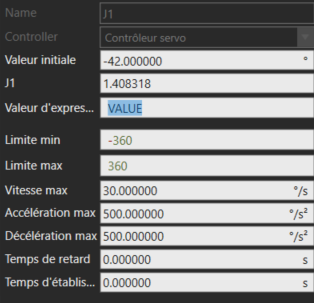
I did find it, and if i change the value (here the value is 1.408318°) the table rotates correctly in modelisation tab.
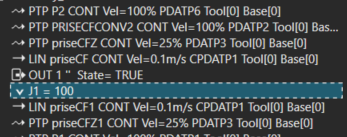
But I want the table to rotate during the simulation, I try to add this inside the simulation JOB MAP .VALUE=100 but it didn’t work so I assume i have to link this J1 to an reel number.
hello , does someone has any idea? I try every option possible I cannot change this VALUE during the simulation. I’m pretty I just need to link this VALUE to any integer or real number and change this value during simulation but it ain’t work.
Hello , of course i don’t change the “value” ,I know this is J1
but how I change this “J1” inside the Job map into the simulation, that is my goal.
so J1 will change (and rotate) during the simulation process
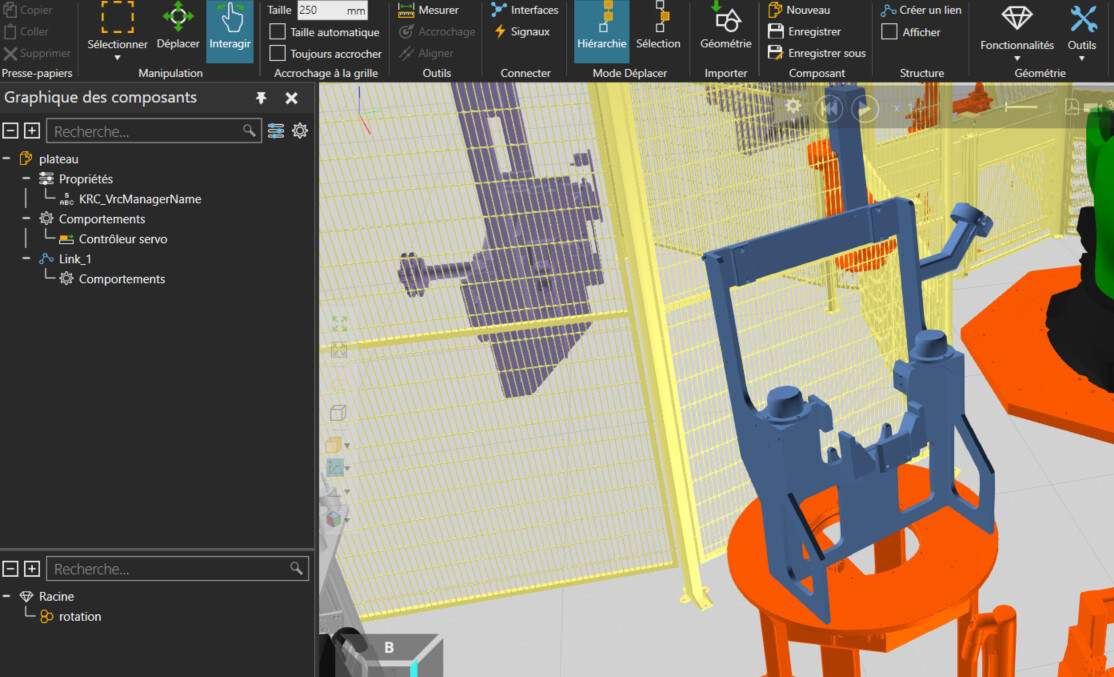
the blue component is the one that need to rotate which it does when I go into the modelisation tab.
On the left side we have the propriety of the component . I’m so sure there is very simple way to make it rotate during the simulation but can’t find it .
 .
.