Hello,
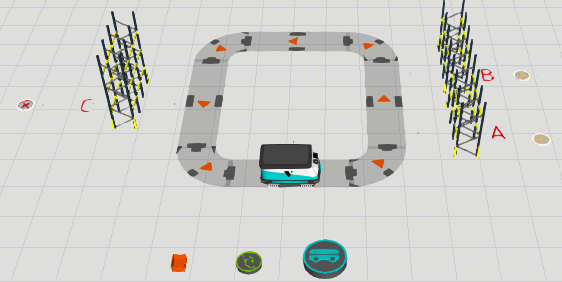
I try to use the AGV to collect available boxes from the two stacks and to deliver them to the single stack. The AGV shall function according to this logic:
- AGV can carry 4 boxes and collect as many boxes as available from stack A (not waiting at stack A to collect and transport all 4 boxes).
- AGV goes next to collect as many boxes as available from stack B (not waiting at stack B to collect and transport all 4 boxes).
- AGV transports as many boxes as was available in stacks A/B and delivers all collected boxes to stack C (can be 2 or 3 pcs).
- AGV goes to idle/charge location only if battery is low and box is not available in stacks A/B.
I have an issue to adapt a such mission logic and I would appreciate you very much if you can refer me with the attached file.
With Missions (Buffers).vcmx (1.2 MB)