When moving a robot I want the points to stay fixed relative to the world coordinate system so I can place the robot in a new location but have the same pick/place locations.
Under the “Program” tab the setting for “Lock Positions” has two options:
1) To Reference
2) To World
The “Reference” options works, all points move with the robot. (its just not what I want)
The “World” option does not work. Some points stay fixed in space as they should, some move with the robot and some move in the opposite direction.
Did you program the points that always move with a Base_Data? If so the Base will be their reference; and thus move when you move the robot.
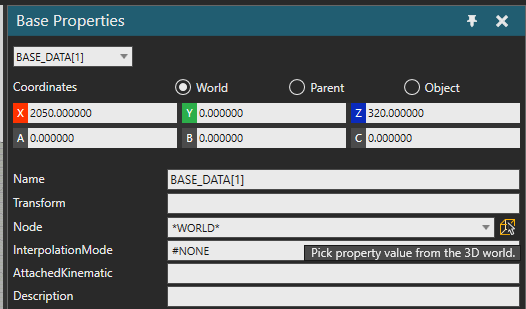
A solution for that is to attach the BaseData to an object in the world with “Node”
This does not appear to be the issue. The motions are all programmed with TOOL[0] BASE_DATA[0] and some points move one way while others stay in place or go in another direction.
what I am finding is that the issue happens when more than one motion references the same point. Additional motion instructions can cause the point to move faster or in the opposite direction.
One workaround that i found is to move the robot with positions “locked to reference” and then click the “move robot world frame” button and move the frame in the opposite direction, this sort of works.