Hello everyone!
I can’t move Link Singnal by Product.
How do I move the product with a link signal?

Thank you.
Gripper-Link-TCP.vcmx (783 KB)
Hello everyone!
I can’t move Link Singnal by Product.
How do I move the product with a link signal?
Thank you.
Gripper-Link-TCP.vcmx (783 KB)
Hi,
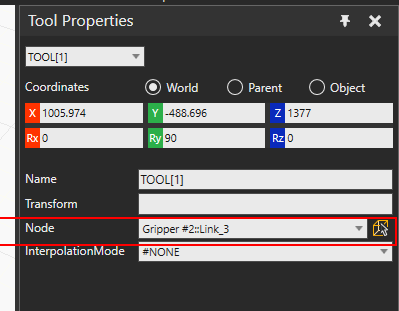
The problem is that grasp action creates parent-child relationship between the product and node to which the tool frame is attached. And by default that node is the robot’s flange node. If you change tool node to be the moving link in the gripper then product should move correctly with the gripper’s joint.
-k
Gripper-Link-TCP-1.vcmx (886 KB)
Thank you for your help.
I can’t open your file.
I use version 4.12, but Tool in your file works well.
but i don’t know “how can this possible?”
Tankyou.
Hi,
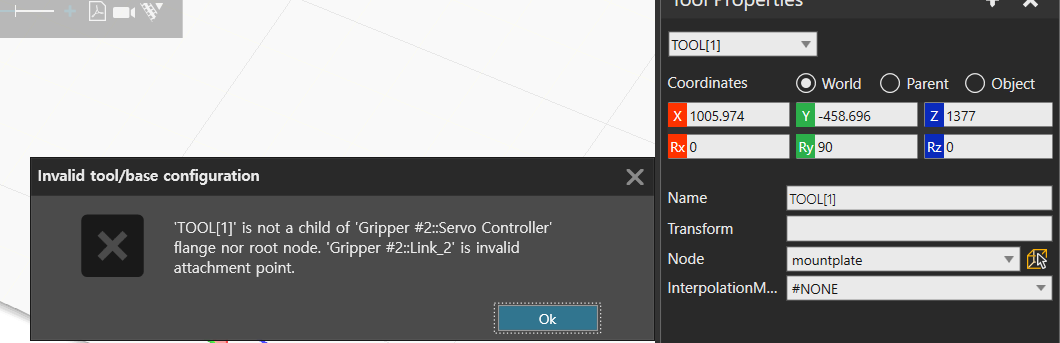
Yeah it is actually a good point. If you attach the tool as I told the TCP will be a part of an extended kinematic chain (servo axes from gripper) that the controller’s kinematics cannot handle. Therefore UI throws that error in 4.1.2 (in 4.2 it doesn’t throw the error). So as a result grasp works OK but there will be a mismatch between the JOG handle and the tool frame location. JOG handle is positioned by the articulated kinematics (6DOF) and frame follows the 6DOF+DOFs from the gripper. So I would suggest not to use this TCP for motions but only for grasping. Then you should be OK.

-k
Tank you for Keke.
It helped me a lot and fixed
-Glofa