我想了好多天,但是还是没有找到一个解决方法来定义这些机构,谁能帮帮我,非常感谢!
HDC8000T_7.vcmx (35.7 MB) ,这是缩小后的组件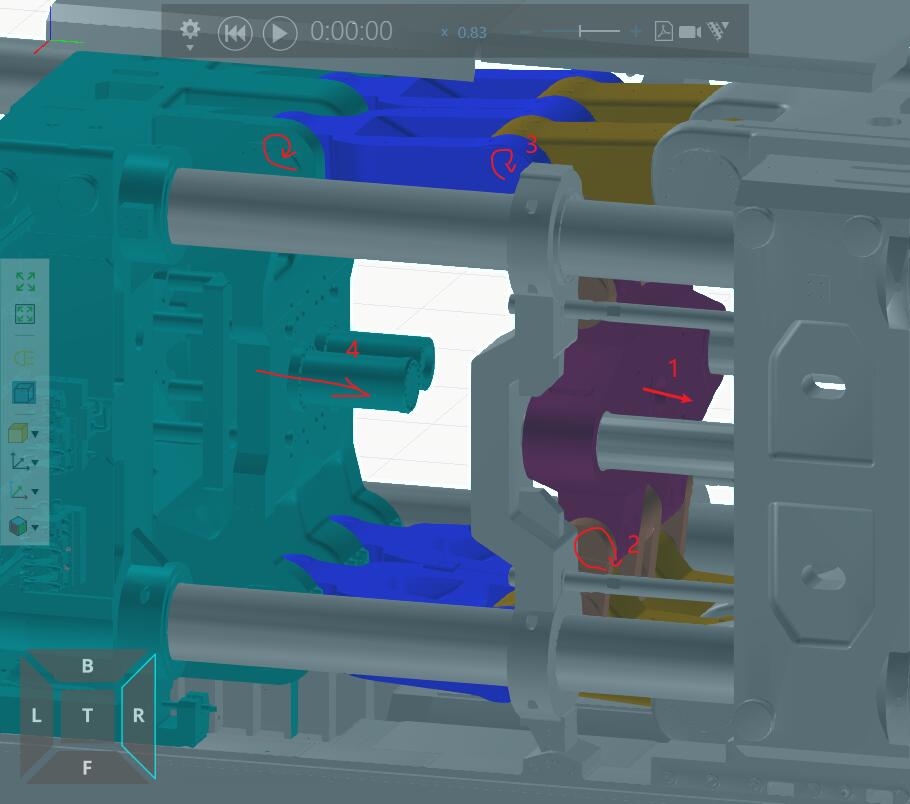
Hy,
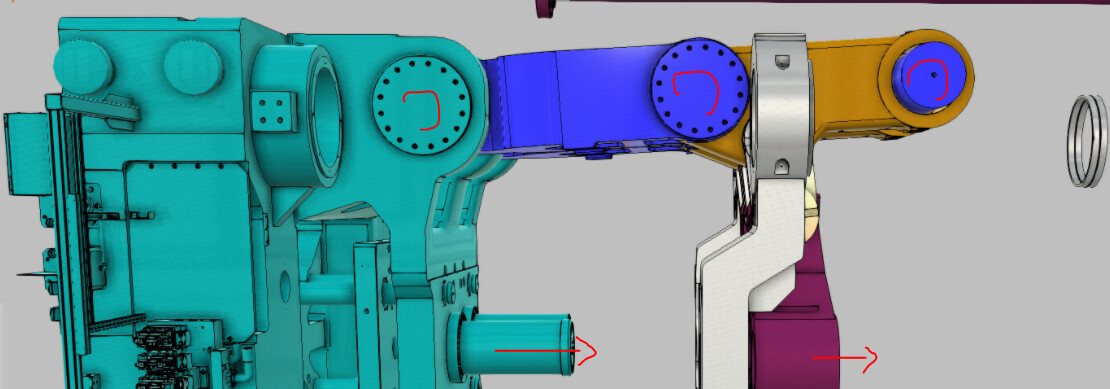
how do Link1 and Link4 moving translational with different speed? → They are driven from the same spindle?
By the way simplifing the model would be great, cause its very heavy! 
Regards
Feature
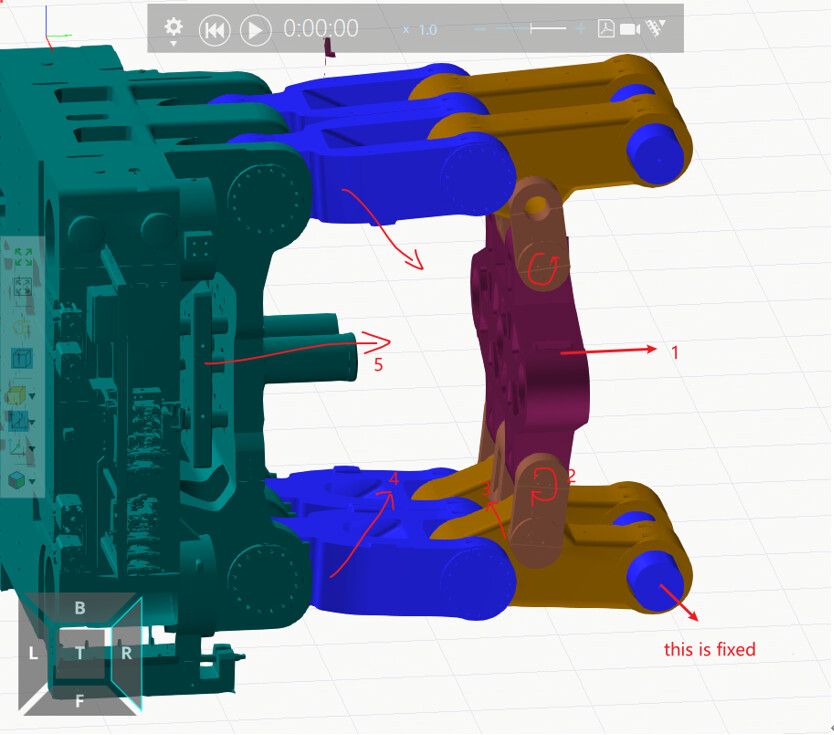
Link 1 moves, causing link 2 to rotate, link 3 to rotate, and link 4 to move
Connection 1 moves horizontally, driving Connection 2 to rotate upward, Connection 3 to rotate upward, Connection 4 to rotate in the middle, and finally Connection 5 to move horizontally
Ok, I think I got it!
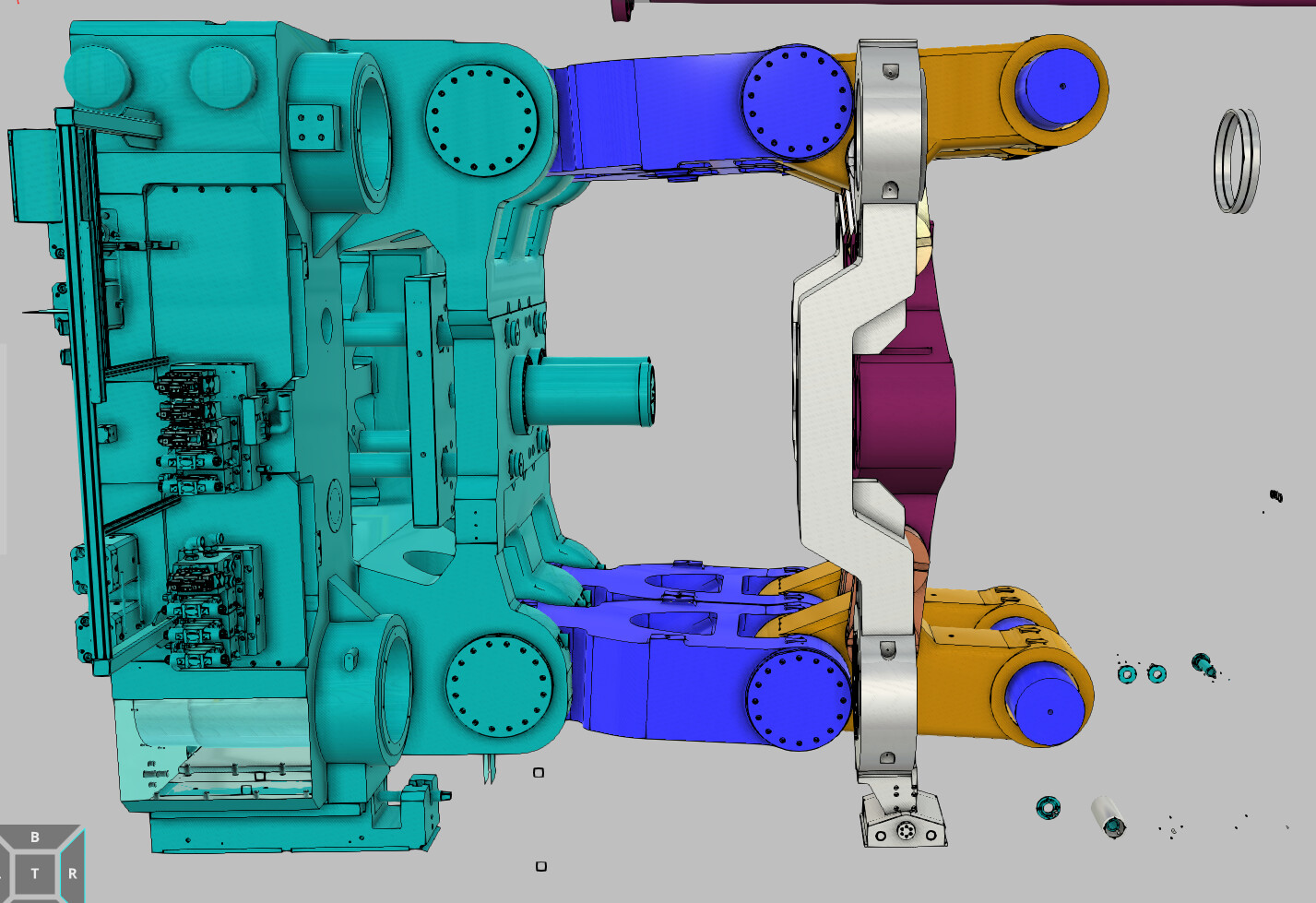
It’s symmetric you just have to solve on side and mirror the solution! ![]()
Regards
Feature
You are right. There is a GIF animation on it which can explain the principle of this machine. Do you have any way to help me define this mechanism?
I have an Idea to solve it but currently my normal work to do… ![]()
On your side I would start with:
- Clean up the whole model-geomtry (simplify, remove small stuff…)-> Make a clean start! → 210MB is quite heavy!

- I think you understood the mechansim (like me now too)
 → Done
→ Done - Save the clean model before start with the kinematic
- Define the links and its structure
- Time for a handsketch for solving each link depending on the driving force
- Solve the kinematic problem with mathematics
- Put the solution to the links (or phyton-script) in a VC-way
Regards
Feature
Hi,brother,can you give me some advise ,or give me the module that already defined
Hy,
I give you some advices how I would start! → We can discuss here but I have not the time to develop kinematics here for you, sorry.
Regards
Feature
