The Hyundai Robot OLP is not working correctly.
I would appreciate a prompt response regarding this issue.
This problem is causing me to question the reliability of other robot OLP programs (KUKA, ABB, FANUC, Kawasaki, etc.).
I haven’t heard back for a week.
I look forward to your swift response.
The Hyundai Robot OLP is not working correctly.
I would appreciate a prompt response regarding this issue.
This problem is causing me to question the reliability of other robot OLP programs (KUKA, ABB, FANUC, Kawasaki, etc.).
I haven’t heard back for a week.
I look forward to your swift response.
i think you guys know this problem.
and other user , please check OLP features.
i wanted open this issue on Open SNS, but i need to heard answer first.
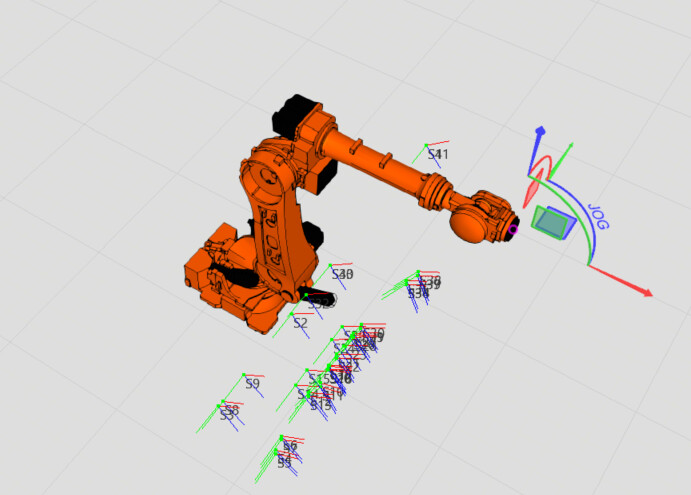
Just by looking at how the points get placed on an arc in VC I would guess that your file has Cartesian coordinates but they are evaluated as robot joint values when importing to VC.
It could also be so that the robot model joint signs and zero positions are incorrect. Not all eCat robots have been validated for OLP. In simulation these details don’t matter as much as long as workspace is set correctly. But when converting VC program to native robot language these small details do matter.
For OLP the usual process is to calibrate the simulation model to match the real setting and part of that process is tuning kinematics so that translation is accurate.
I suggest that you contact your local reseller and request support on how to calibrate the model. I think we don’t have calibrating guides on Academy but only on OLP extranet.
Current state of eCat robots is that not all of them are ready for OLP out of the box. This varies between brands and I think some brands like ABB, KUKA and Fanuc work better. But others like for example Hyundai have inconsistencies like this. The fact is that we are not able to validate robot models against virtual or real controller but the main information for modeling is the manufacturers data sheets. Those often don’t show the joint zero positions and directions but only the workspace, limits and speed characteristics.
Taewook,
We’re closely working with our local partner RCK in this and they have been providing information to you (including yesterday’s video you received), more is to follow to help you in this - through RCK.
Taewook, we understand your frustration and we are working on fixing the Hyundai issue. With 100+ robot brands it is quite some work to ensure all works all the time flawless. Sometimes things unfortunately happen.
The ABB, KUKA and Fanuc brands all work according to specifications, they have been thoroughly tested.
Kawasaki and Yaskawa libraries have been improved as connectivity plugin was released for those in 4.9. And we’re still testing more as we speak.
I agree with Hans that you’re not wrong. The situation is not ideal and eCat quality has room for improvement. Many models were done way before we had OLP features in the product. We cannot make models perfect over night but we can continue improving them and provide support with getting your models OLP compatible.
At least, I hope the functions that made into videos and used as sales points work well without any problems.
This is because most company buy the video because they think it’s cool.