I started to learn the Academy Robot Simulation Path. According the Introduction to Layout Configuration document I created a cell with a generic robot. Every time I try to start the simulation I get an error about the exceeded acceleration limit. If I change the speed and acceleration on the program tab after the start VC change it back for the max speed and acc. I can’t get through the first layout.
Can anyone help me how I can slow down the robot?
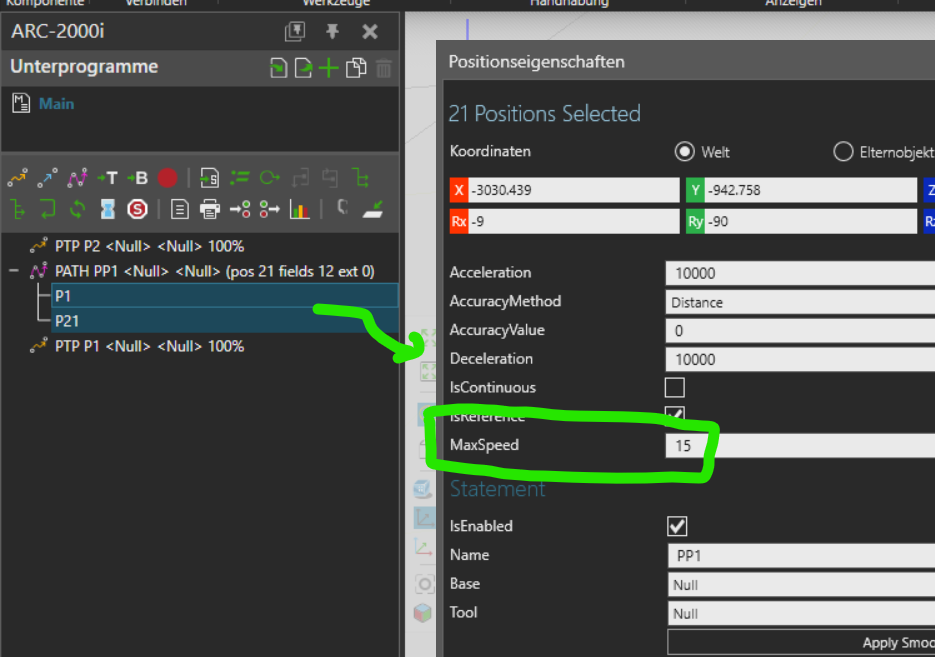
Given that you referred to the robot path, are you talking about the path statement and wanting to slow down the movement between points?
If so, you can select the first and last point of this created path-statement (using the Shift key on your keyboard to select all points in between), and then adjust the speed in the properties on the right side. That should work?
Thank you for your response.
I know this method. My problem is if I create the cell according to the VC Academy I’m not able to change the speed.
According to the Academy docs I dragged and dropped components and I linked them on the process tab Editor and started the simulation I always got the error about the acc or speed limit. If I clicked the program tab and changed the speed and acceleration it looked good but when I restarted the simulation I got the same error and the speed and acc changed back to the original values.
So I downloaded the tutorial vcmx file from that page and when I started that simulation I got the same error.
The page is VC Academy learning path:
The file is the “Introduction to Layout Configuration - Process Modeling” vcmx file
The error:
Generic Articulated Robot::J2 exceeded acceleration limit of 660.
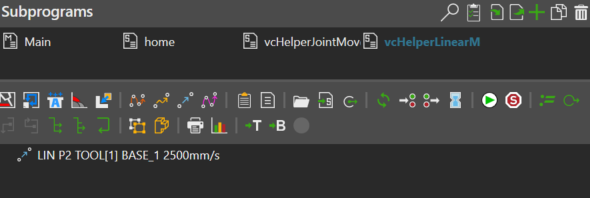
The program tab:
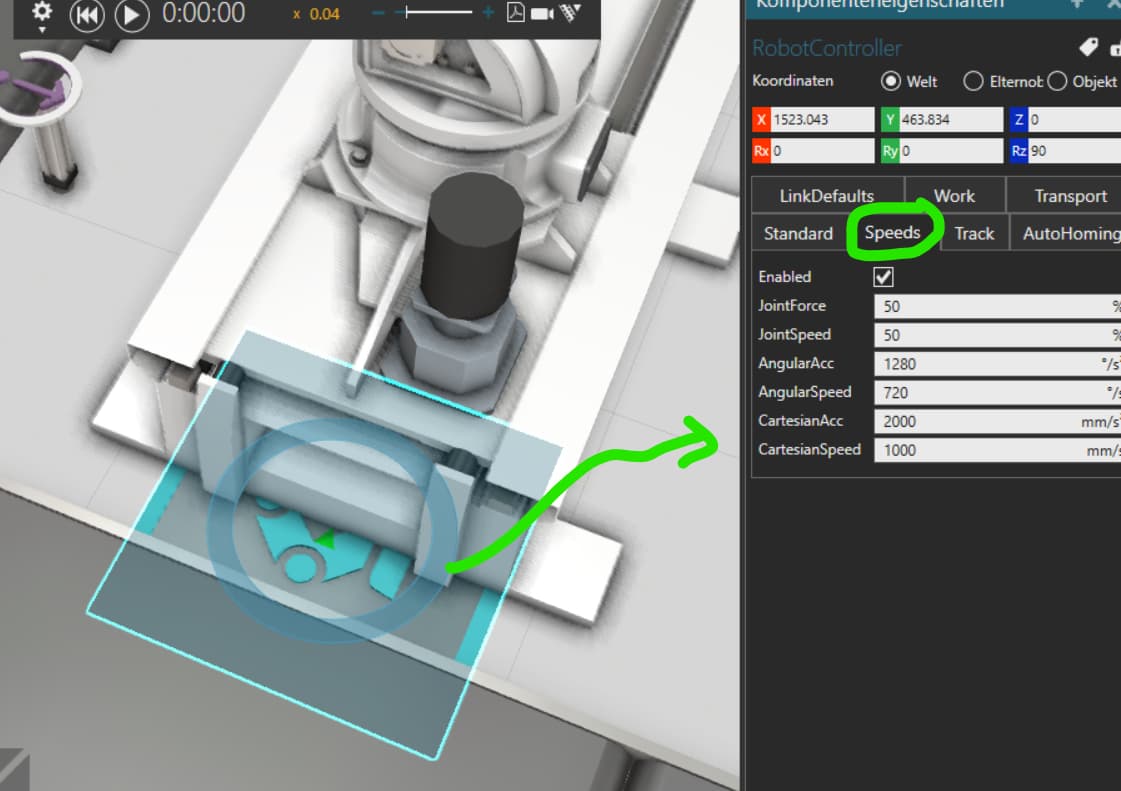
Note that in vcHelperJointMove and LinearMove routines, points are automatically written/overwritten by the robot transport controller. If you want to change the speeds, use the component properties of the controller: