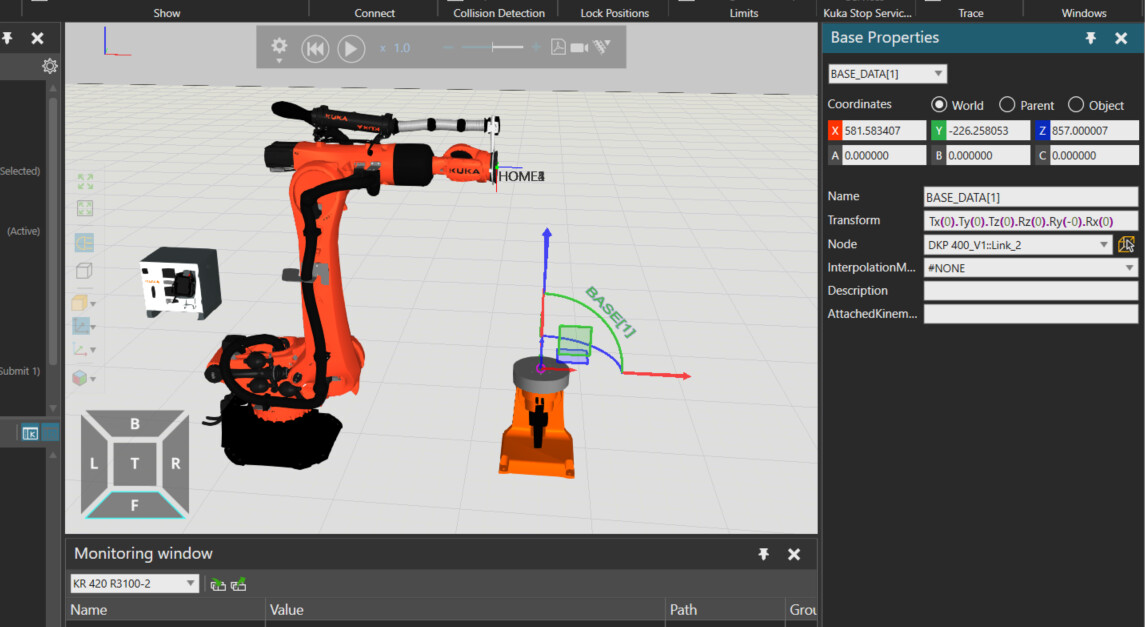
Hello, I’m trying to make program with base on external positioner like in tutorials but when I use it in program robot go to completely wrong positions. I try with different robots and positioners nothing helps. Can someone help me ?

hi
means that your points are somewhere else in the 3D world?
did you first teach points with base_1 and then changed the base position?
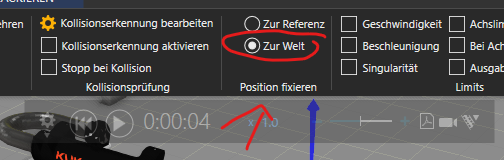
In this case you should choose the option fix position to world:
2 Likes
Omg it was so easy thank You very much ![]()
1 Like
One more question. I have robot on track with one more external axis, it’s cart on same track. Robot needs to drop part on this cart. Cart is moving synchronius to robot. Calculations of drop positions seems ok, I can move there robot manualy and it looks ok but when I run simulation it seems that robot don’t reach drop position. I don’t have any errors in program. How can I solve this issu ?

1 Like