It is possible to modify robot E1 axis as async axis in Visual Components and Kuka OLP? Now system complain that the variable is read-only.
Hello Korha,
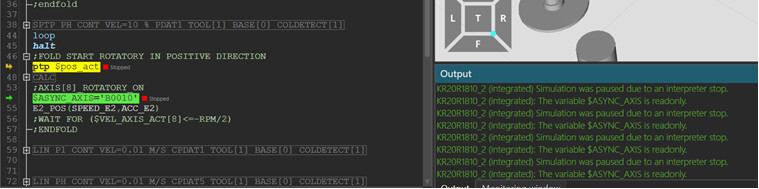
The variable $ASYNC_AXIS is read only and thereby can not be set as on a real robot. Thereby you cannot switch from SYNC to ASYNC in KUKA OLP.
Maybe you can build a workaround with signals to your positioner that then rotates?
Solved by using two robots. Other one doing work and other one controls table.
1 Like