Hello,
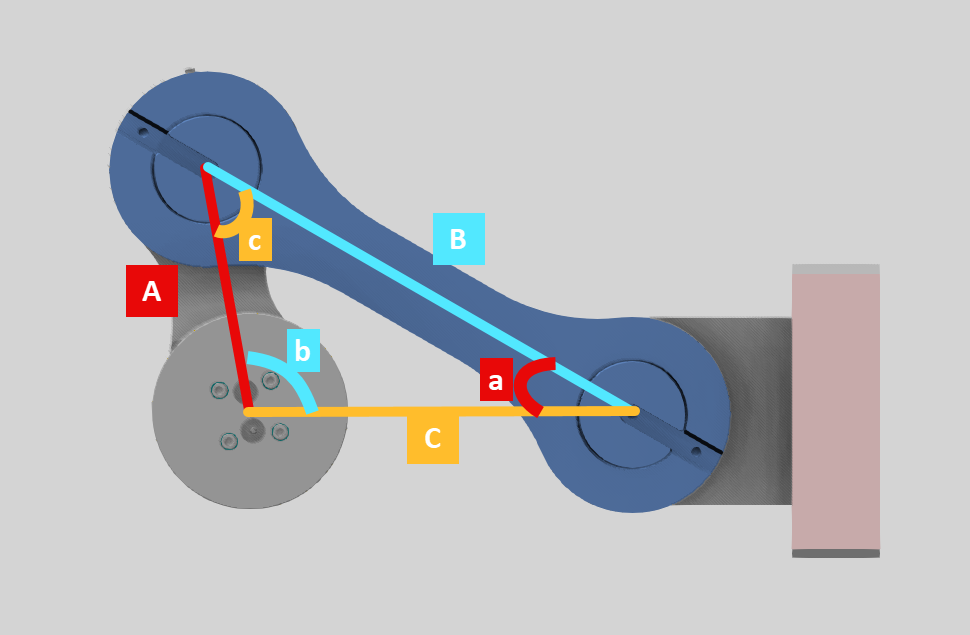
if you look at it from the side, you have a nice triangle. I guess you now the length of the sides A and B, and the angle “b” is your rotation. You can use the trigonometry formulas for non right triangles to get quite easily the angle “a” and from that the angle “c”. (just look for non right triangle trig on the internet and you should find many explanations)
As JointType you could use “Rotational follower” to follow the rotation of the motor. That way you can use easily the value of the angle “b” which is the value of your joint Motor.
You can have a look at this example: Mechanism Wizard - #6 by keke