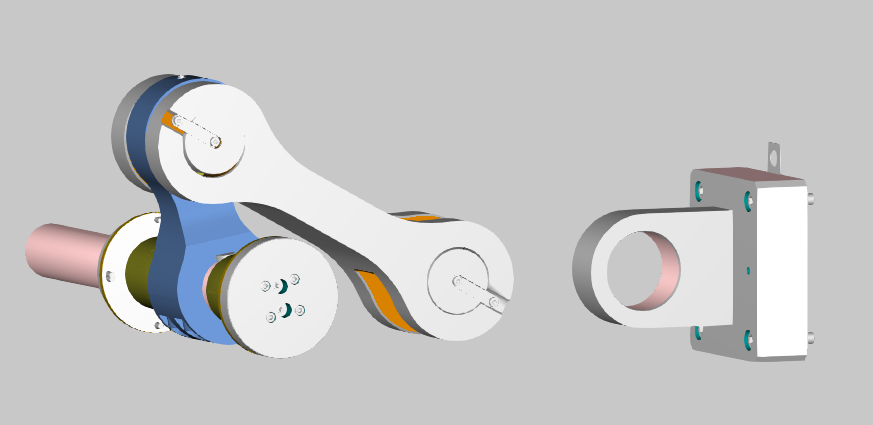
I try to simulate a knee lever in Kuka.Sim. I couldnt find any template or previous model so I tried to create one on my own. Unfortunately I have some issues where you guys might know how to solve them.
The motor (turning/rotating JointType with Offset in the middle of the motor axis) turns a static rod which is shift bound below the motors component. A second rod is shift bound to the first rod and has its offset at the second rotating point of the first rod.
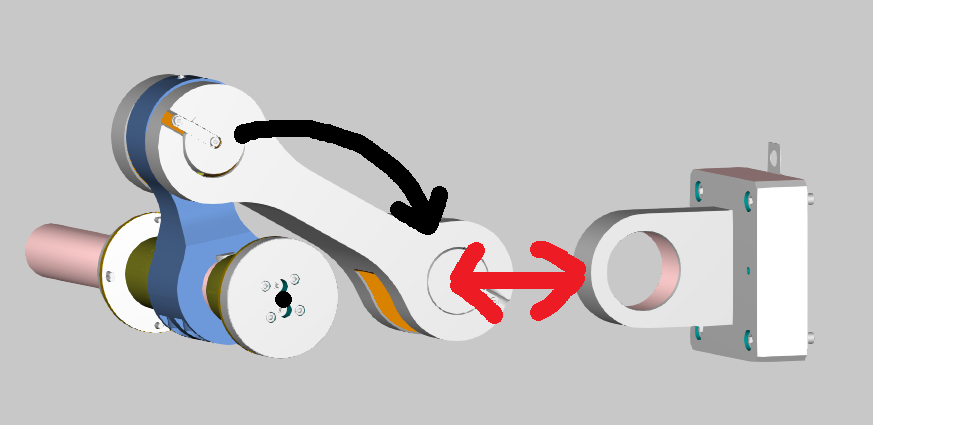
What I am missing now, is the movement of the second rod. More specifically the matching rotation, so the second rod does a linear movement to a machine part. I tried to play with the mathematical expression but couldnt find a matching equation.
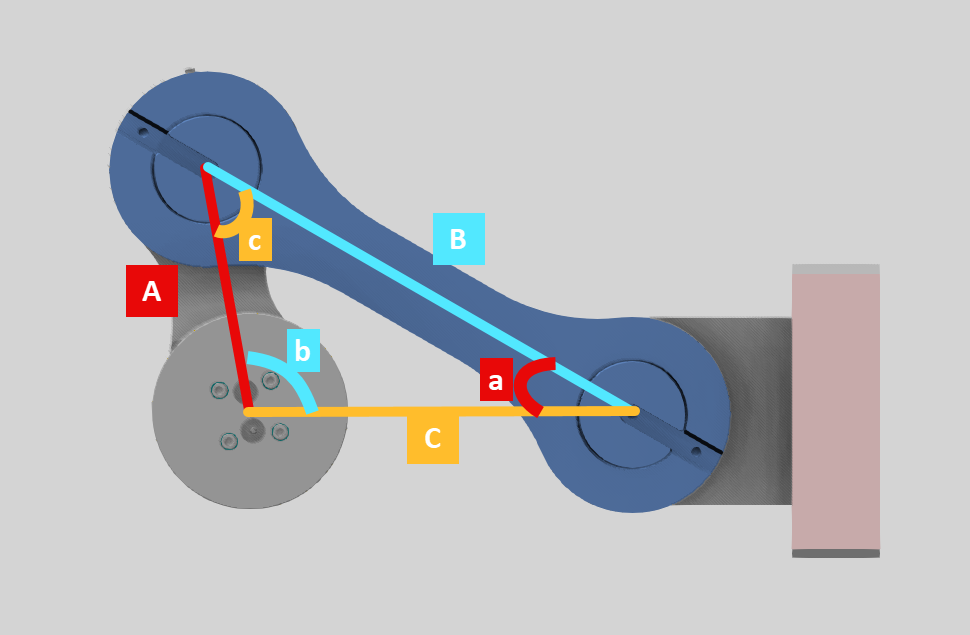
if you look at it from the side, you have a nice triangle. I guess you now the length of the sides A and B, and the angle “b” is your rotation. You can use the trigonometry formulas for non right triangles to get quite easily the angle “a” and from that the angle “c”. (just look for non right triangle trig on the internet and you should find many explanations)
As JointType you could use “Rotational follower” to follow the rotation of the motor. That way you can use easily the value of the angle “b” which is the value of your joint Motor.
I used your idea and drew the whole thing on paper, and then, using the laws of trigonometry, I was able to come up with a formula for the angle. Thank you very much.