I am creating a 6DoF articulated robot in Visual Component Premium 4.1. As reference template I am using ABB IRB 120 robot for my articulated robot. In Behvior tree to set kinematics it requires length of L01Z, L12X, L12Y etc. I got DH parameters and all joints (x,y,z) points for 6axis. How can I find those length kinematic values for creating my model from my parameters?
Articaulted kinematics behaviour (AKin2) is typically used for a robot which has 6 axes and whose 2,3 and 5 axes are parallel to world Y-axis and axes 1, 4 and 6 are parallel to world Z-axis if you consider the arm to be in upright position like in the picture below. This is the so called nominal zero position of the for the AKin2. Robot’s actual zero position doesn’t have to be upright but you can offset it with JointZeroPositionX properties in the kinematics. And JointSignX properties can change the joint signs which by default are Z+, Y+, Y+, Z+, Y+, Z+.
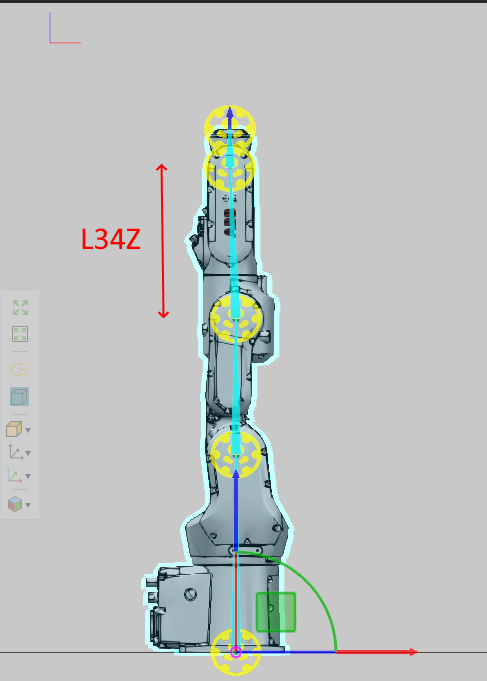
Kinematic lengths in AKin2 are the offsets between joints in world coordinates if the arm is upright. So L34Z would be the Z-offset between joints 3 and 4 in the picture. Parametric model in AKin2 is not the same as DH parameters in robotics but you should be able to recognize which DH parameters correspond to which AKin2 parameters.
Note that not every 6 axis robot can be modeled using AKin2. For example UR arms have 4th axis parallel to world Y (not Z) so AKin2 cannot be used for that. Basically if you can jog your arm upright like in the picture and have its joint axes be Z,Y,Y,Z,Y,Z then you can probably model it with AKin2.
1 Like