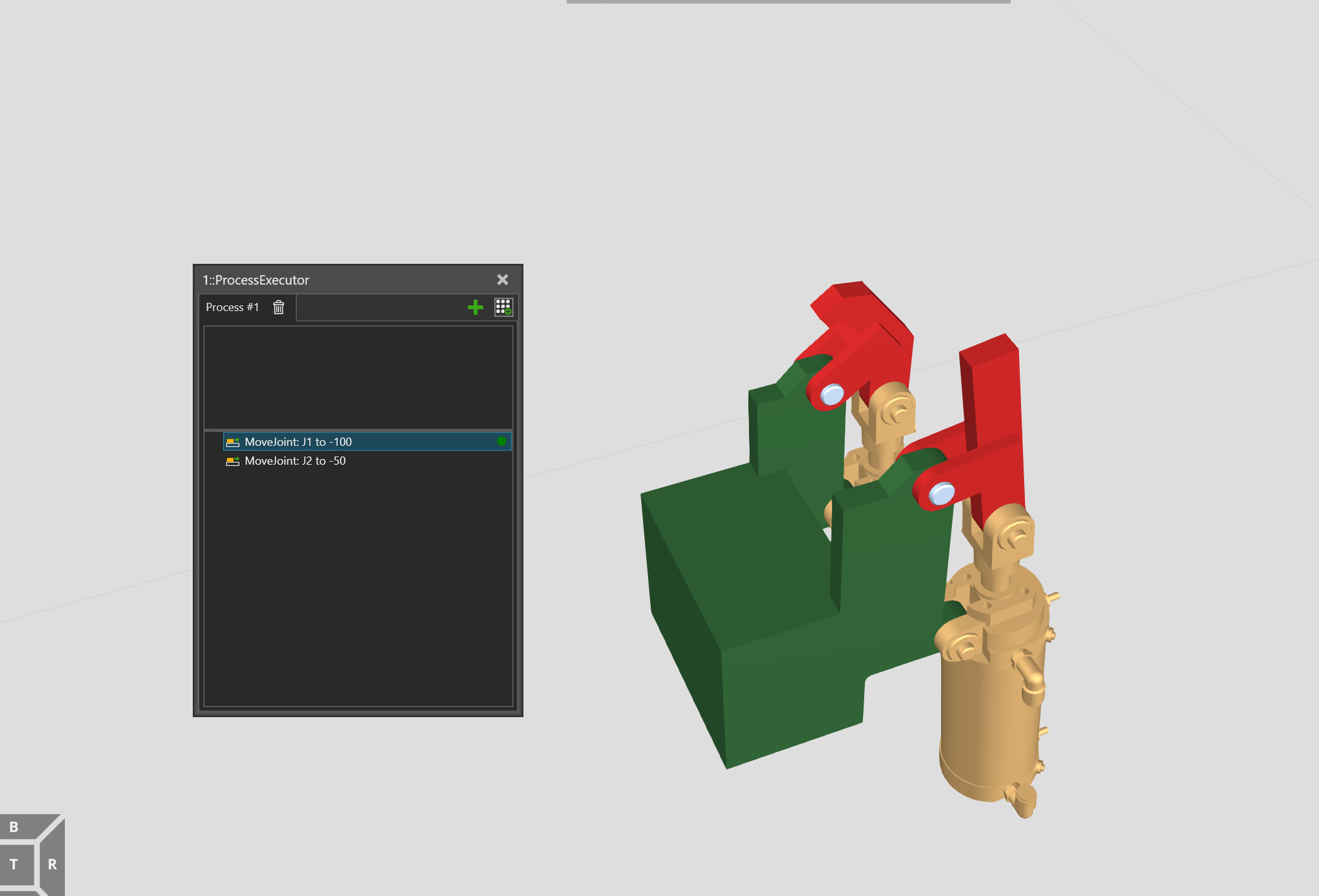
I am learing the program and making clamp work.
I have to work several clamps simultaneously.
After I make the links, It will work sequentially.
Is there any way to work simultaneously??
I am learing the program and making clamp work.
I have to work several clamps simultaneously.
After I make the links, It will work sequentially.
Is there any way to work simultaneously??
Hy,
in a Python Script you can realize this using the move(…) method from vcServoController.
With PM its currently not possible, but I know that the German Reseller Dualis has a modified MoveJoint witch made what you want! → May you write an E-mail to them?
Regards
Feature
okay, Thank. I will write it
Your model looks like there is mechanical linkage, i.e. the joints always follow each other. You can model that using follower joints and then you only need to move the driving joint with a statement.
Edit. If you have multiple components then that won’t really work of course. In that case you would anyway probably need to use some scripting and signaling to sync all the motions.