Hello guys, new user here.
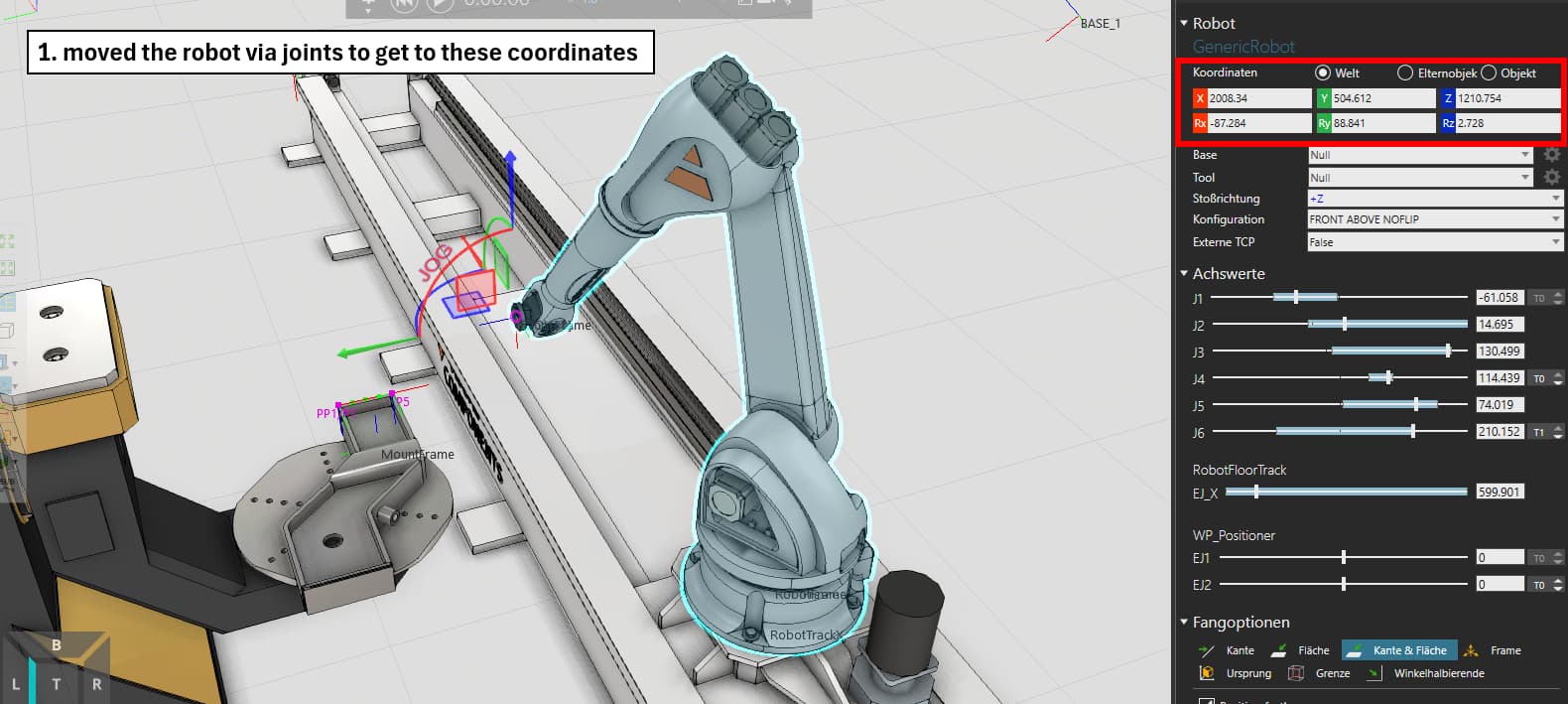
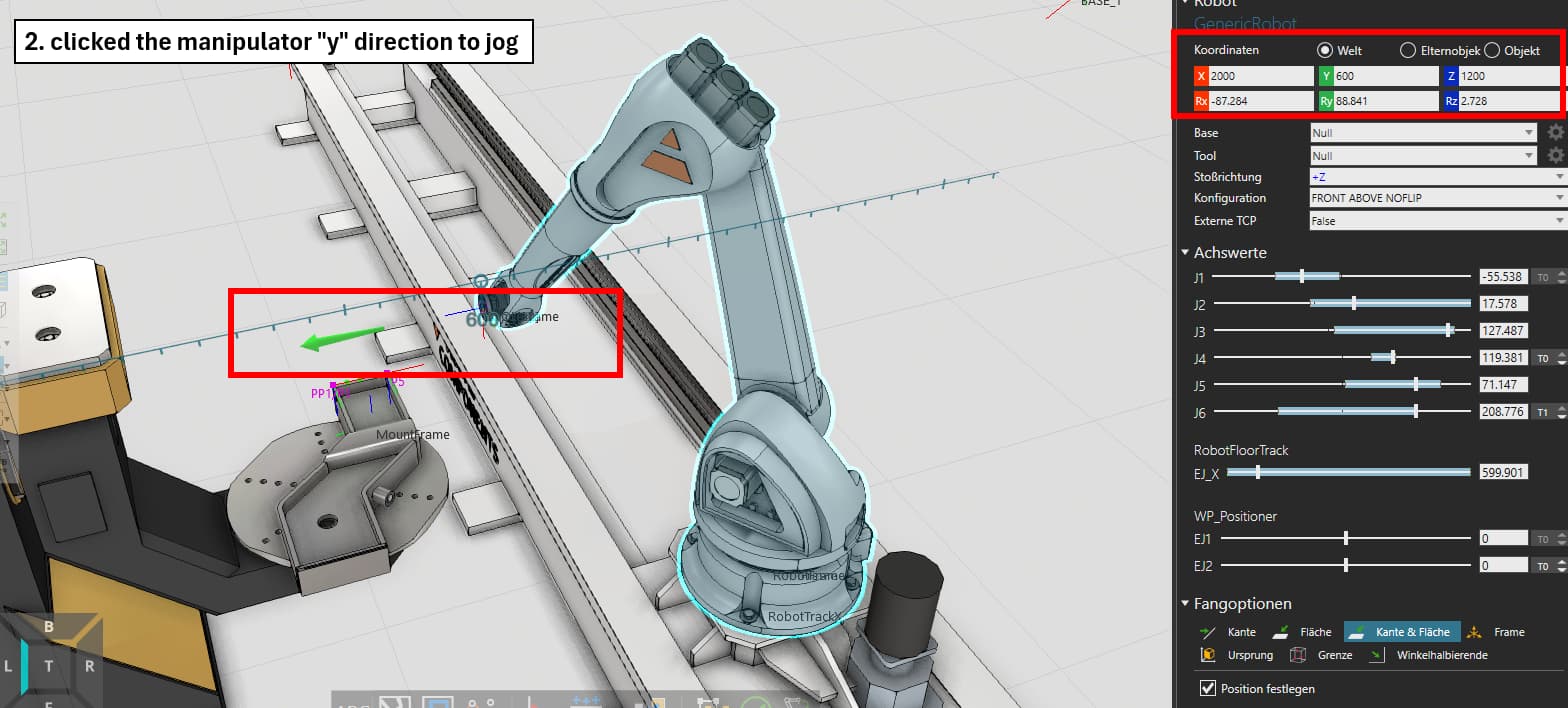
My problem is that I can only jog the robot by at least 10mm and if i start to jog the robot into one direction via the manipulator frame, it even rounds the existing coordinates of x, y, z to steps of 10. It really bugs me out. I use the Robotics OLP 4.10 version. Do I need “professional” to be able to jog smoothly? That would be pretty ridiculous imo.. Any help would be greatly appreciated.
Kind regards
Maik