Hi all,
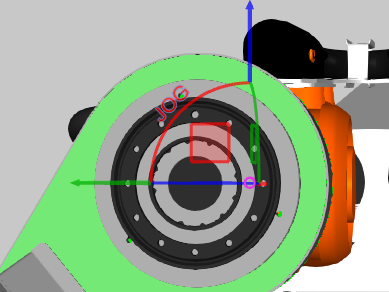
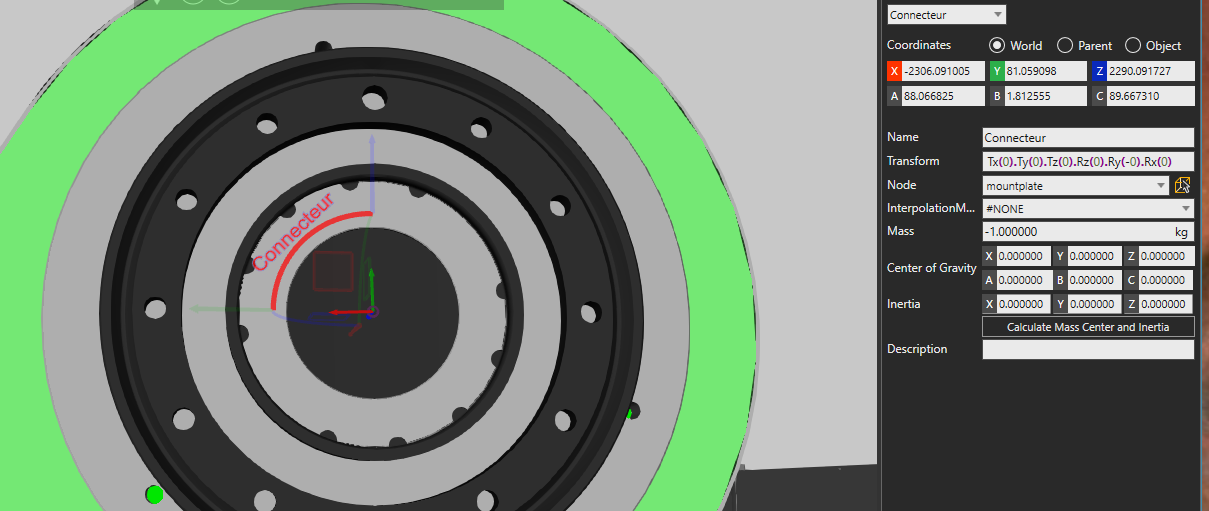
My jog frame has an offset VS my robot/tools TCP.
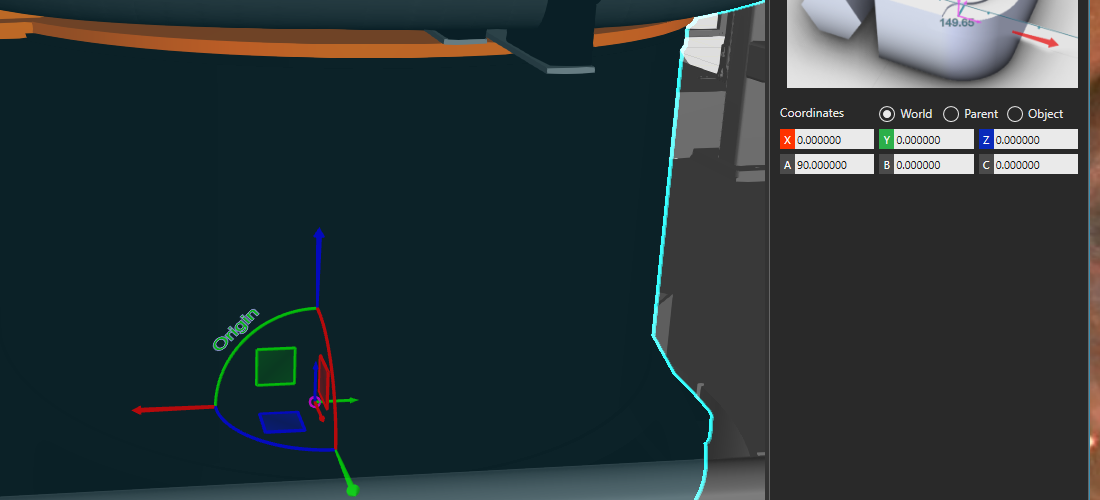
When I look at world origin and robot origin they seems to match, what else could cause this?
Thanks!
Hi all,
My jog frame has an offset VS my robot/tools TCP.
When I look at world origin and robot origin they seems to match, what else could cause this?
Thanks!
Hi,
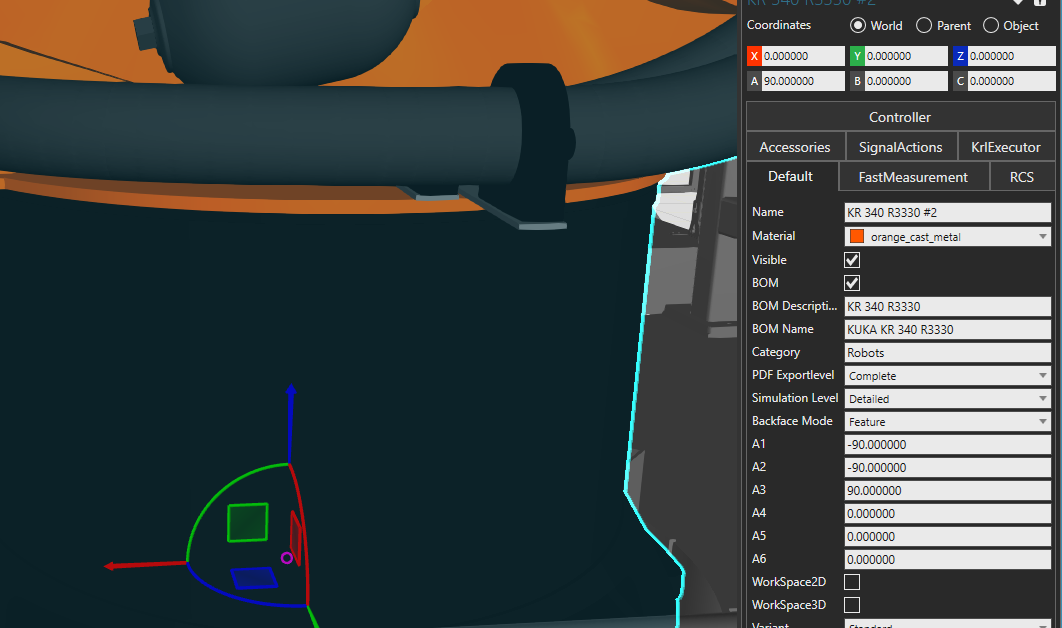
This looks like that the kinematics of the robot is somewhat off. Did you change them or is this “clean” component from eCatalog?
br,
Lefa
I didn’t change them intentionnaly…and never could find how to fix it
I ended up deleting the robot and migrating all programs and configuration to a new one and now it’s ok but i’ve lost a lot of time.