As a beginner, I’ve run into a tough issue: after connecting the Elevate lift table to the robot, I used a process to pick up materials from the Conveyor and stack them onto the Pallet for palletizing simulation. I’ve written the offset program, but the Elevate lift table fails to move, resulting in materials only being stacked up to the 4th layer.
Hello,
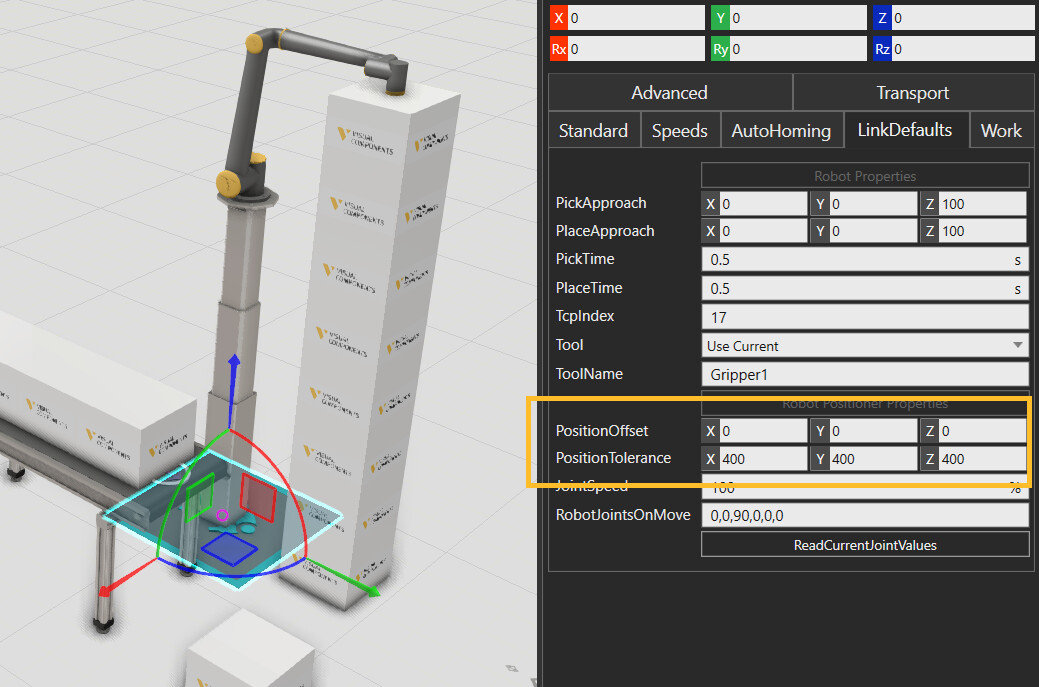
what do you mean by I’ve written the offset program?
You said you’re using a process to pick the material, so I suppose you are using a Robot Transport Controller. So do you mean the offset parameters in the Robot transport Controller or in the TransportLink?
Hello, thank you for your reply. I want to grab materials from the conveyor belt and place them onto the pallet. However, I have a question: the lifting motion of the robot’s 7th axis does not adjust according to the placement height of the materials. As a result, the robot stops working after placing the fourth layer of materials. I still don’t know how to use the lifting column properly. Maybe you can take a look at my layout file,
最新升降柱码垛仿真.vcmx (2.7 MB)