I’m not quite sure what’s happening, my OLP welding robots, in different environments and then different phenomena, one showing bizarre behavior and one normal, but the fact is that the components inside the normal simulation are nothing more than what I’ve derived from the anomalous simulation.
I’m having a headache and would appreciate anyone’s help, I don’t know if this is a bug in VC version 4.10 or something else?
Thanks in advance and looking forward to anyone’s reply!
The file I will give as a netbook (it’s a bit big).
1 Like
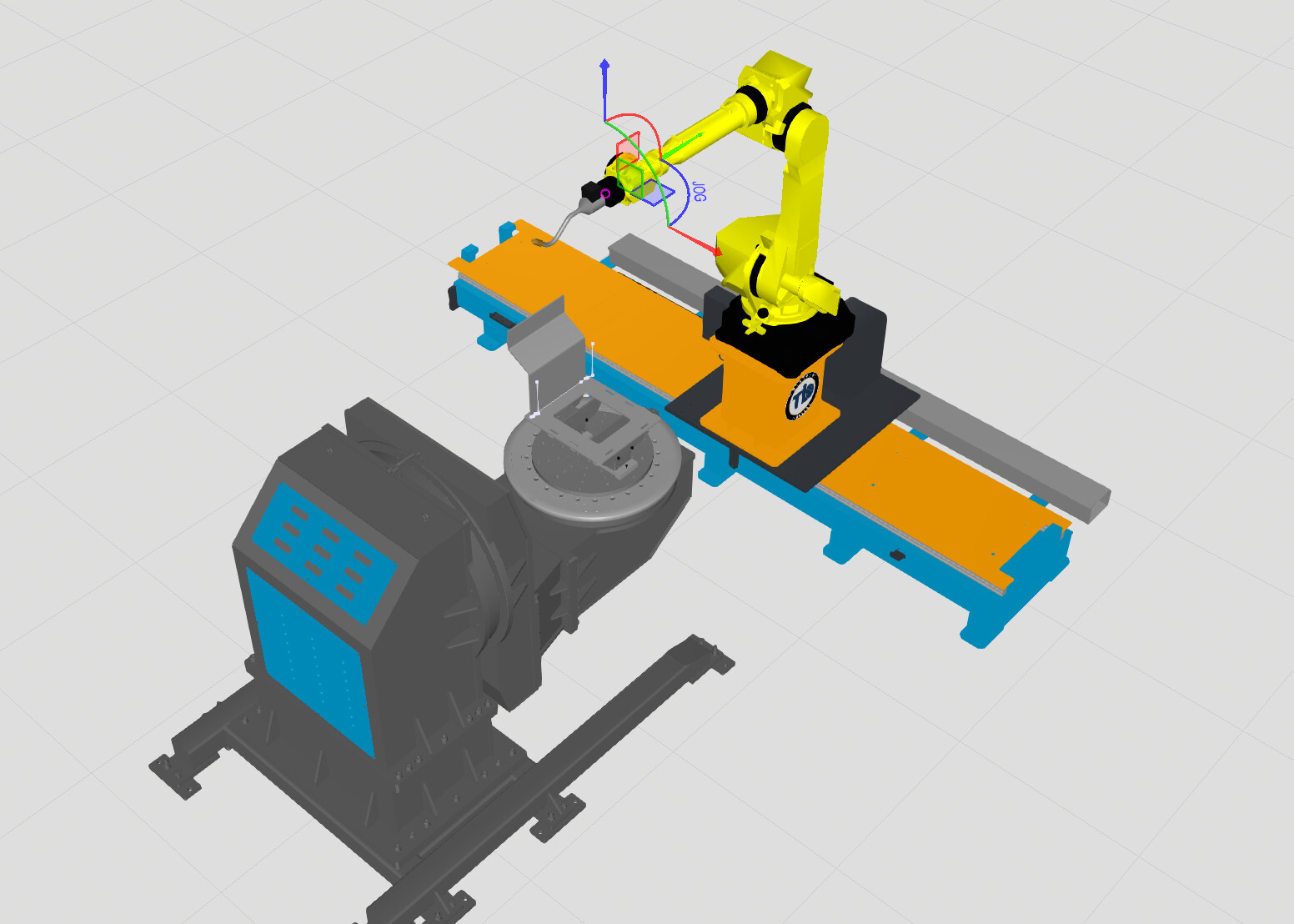
I guess one problem is that robot and workpiece positioner are not on the same sub-layout. That causes problems for the robot controller as it cannot resolve its kinematic chains properly. If I move all components to root layout at least the robot program executes, see the video.
-k
1 Like
Whoo-hoo! Yeah, that’s how I want him to run. At least he’s moving.
However, I still think it’s a bug or a point of improvement, in my experience from 4.5 up to now, when I put multiple simulated sub-layouts together, I don’t expect that I’ll need to take the extra step of moving them around, multiple sub-layouts are supposed to be the highlight, much like the PD in Siemens’ PDPS, which allows for multi-person chunking of a large project, but now it clashes with another highlight, OLP, which is a slight disappointment.
I hope to hear about optimization, and here’s to thanking you for your reply, it’s been very helpful, have a great day, and Merry Christmas in advance! ![]()
2 Likes