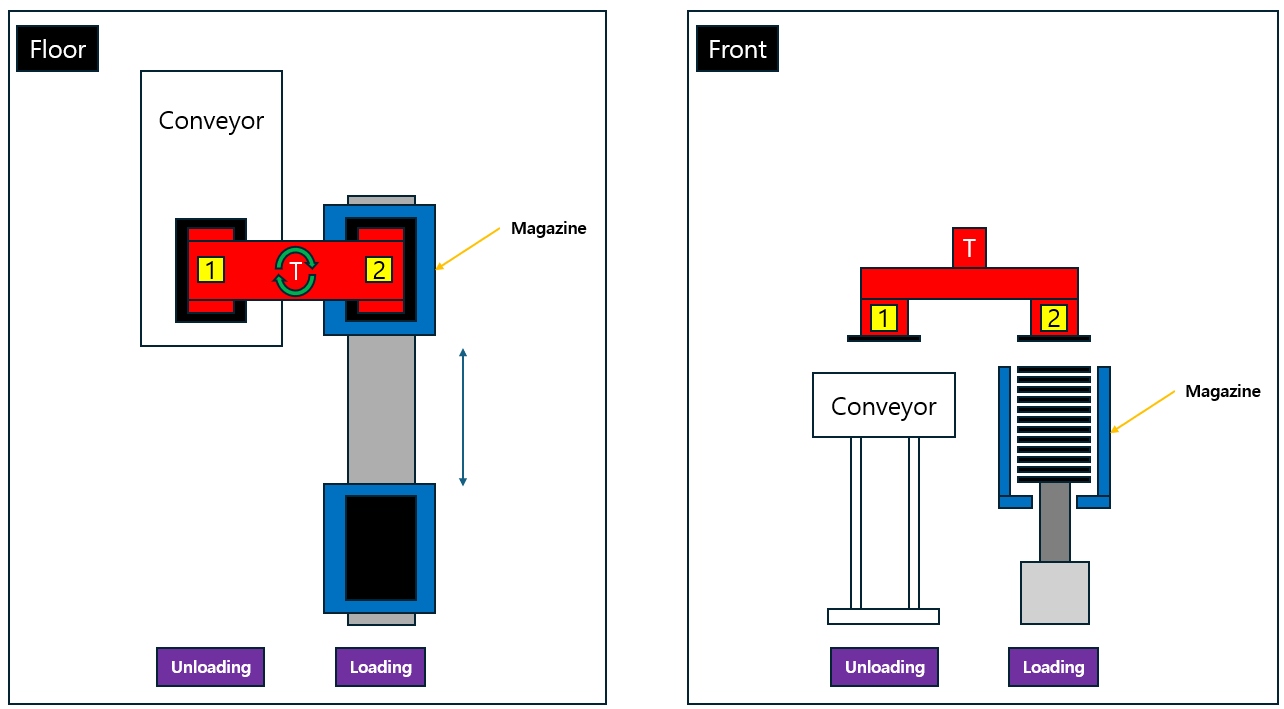
Please refer to the picture above.
I want use 1, 2 Pick Up Point.
Pick up unit has T Axis, so Pick up & Place at the same time.
To explain about sequence simply:
Picker Down > Point 2 Loading product > Picker Up > T-axis movement 180 degrees >
Picker down (Point 2 : UnLoading Product to Conveyor / Point 1 : Loading Product from Magazine) > Picker Up
T-axis movement 0 Degrees > Picker down (Point 1 : UnLoading Product to Conveyor / Point 2 : Loading Product from Magazine)
Repeat the above sequence until all products have been used.
So How can I implement the above behavior using Grasp Wizard?
Hello,
If you don’t want to write a Python script, the Grasp Action Wizard is a nice solution.
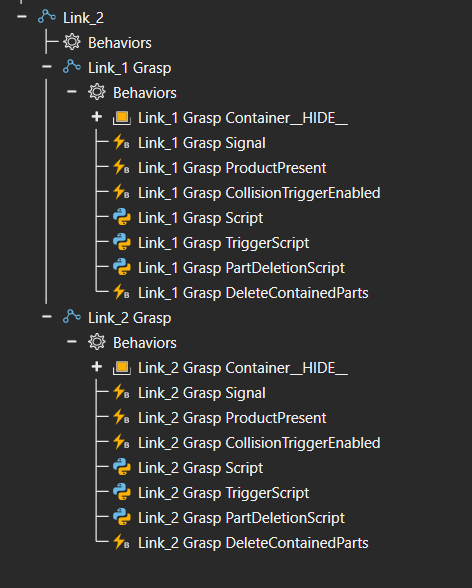
To have one grasping action on each side, you can create one Grasping Node on one side, then rename the Link and create a second one (otherwise it will be overwritten, as it would have the same name). Don’t forget to move the frames where the products need to be grasped.
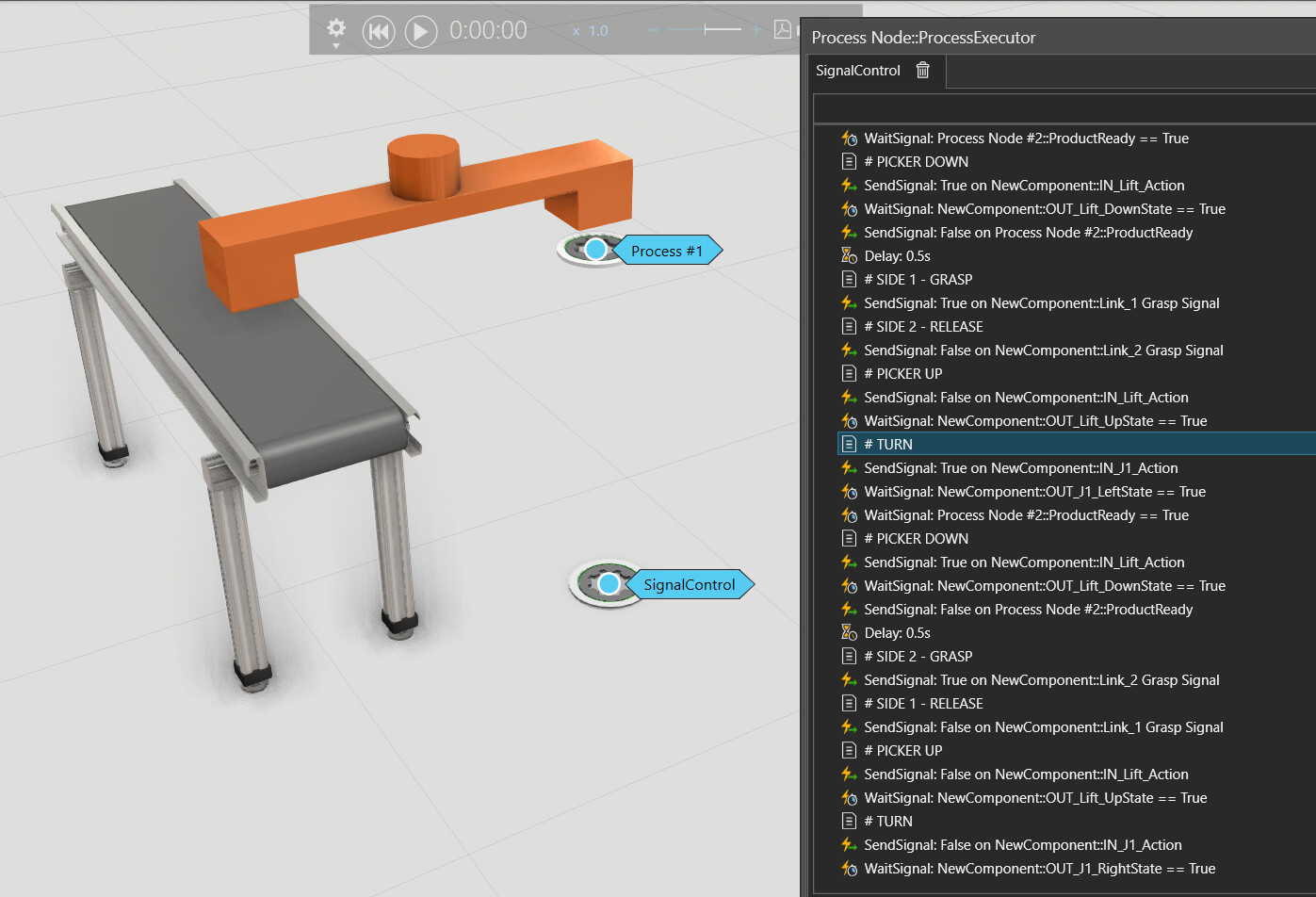
The IO-Wizard will create signals to control your joints. There is different way you could control them. Here is an exemple using a Process with WaitSignal and SendSignals statements: