Hello,
To preface this, I am relatively new to Visual Components, and that is the first time I work with the program tab so these issues might have simple solutions that I am unaware of.
I am having some problems with a robot program that I am building. The biggest issue I am running into is that when I jog the robot and set a point, the robot cannot seem to reach that position, despite it being reachable (if we include the robot positioner in the workspace). If I explicitly set points by changing the floor track position, the TCP position does not follow along. If I do set the TCP to be in the same relative position to the robot throughout the track move, the TCP gets ahead of the robot, meaning that to set points, I can only do short movements at a time without changing the TCP giving me an unfaithful representation of the robot’s final position and its TCP location.
I have attached the layout as it is right now. I understand that I am not using the subprograms optimally and I am open to changing those, but for the time being my priority is to get the robot to move as intended.
Thanks for any help!
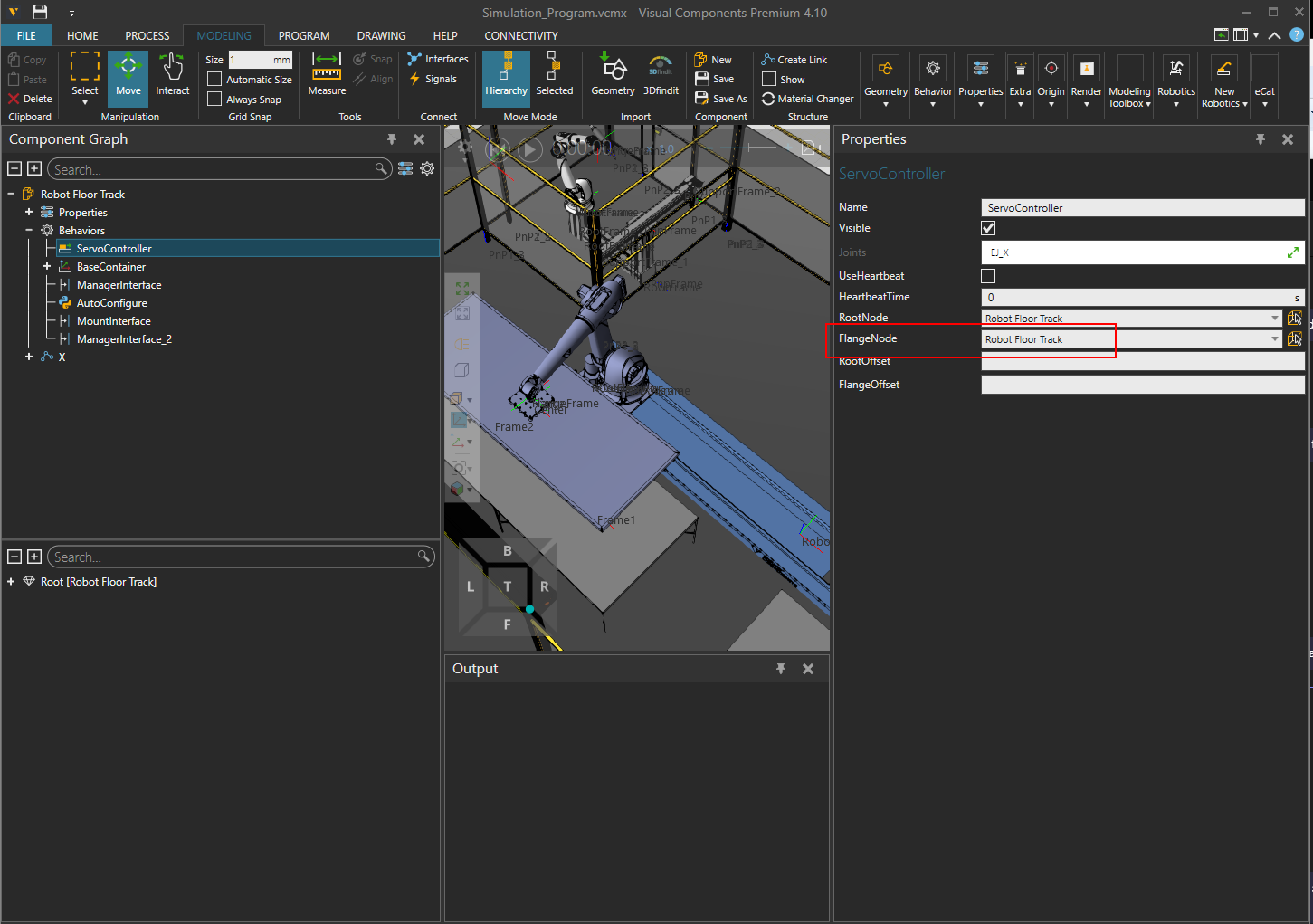
Simulation_Program.vcmx (3.0 MB)