I’m only finding complex answers (Python API) in the academy, but I think it’s not that complicated.
It’s a robot operation on a 7th axis.
The robot performs operations, then the 7th axis needs to move based on a variable that I increment. After that, the robot performs the operation again with a base offset.
The problem is that I cannot apply a variable to a linear axis.
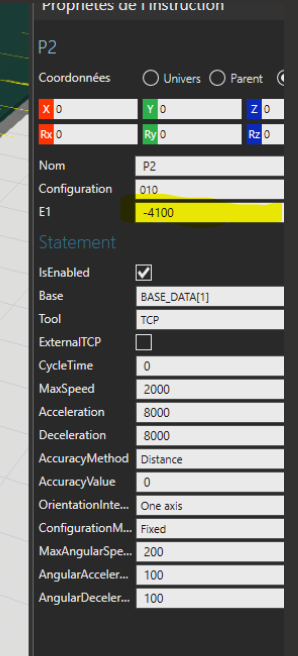
Here, in yellow, I would like to enter “X” in the motion instruction. However, I can only input numerical values. ,bit isnt"t possible to reference ton variable from the routine ??
Is this possible?
I have already declared a real variable X = 0 in the routine initially.
As far as I know, VC motion statements don’t support parametrization like you describe. The only dynamic things (which can be different for each execution of the statement) are the tool and base frames.
Well, it work’s fine with tool and frame, but that with eternal axis we cannot use that to our advantage.
But it seems crasy to me that such a simple thing isn’t possible.
Such limitation also has advantages, like being able to easily calculate and visualize the position and pose of the robot in that point without having to evaluate the whole program up to that point. It is also generally impossible to know what paths your robot progam may take depending on e.g. external input and thus what values the routine variables would have when reaching the statement.
Hi there…I know it’s been a few months, but I’m running into the same issue, and not sure how to fix it without creating dozens and dozens of redundant positions, with just the E1 value changing. Did you come up with a solution, if you don’t mind me asking?