Hi together,
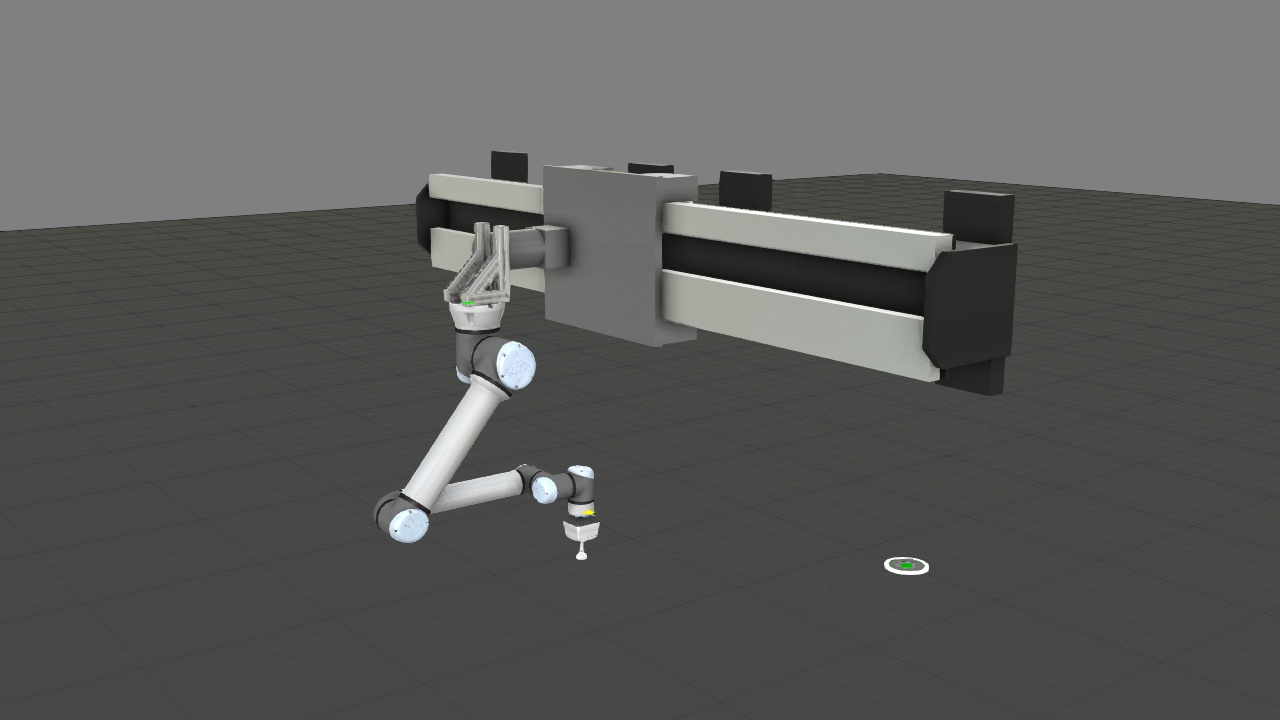
I want to have a robot attached to a 7th axis picking and placing something. With the generic servo track from VC everything works fine, I attached the generic servo track to the robot controller and the robot to the gerneric servo track.
-
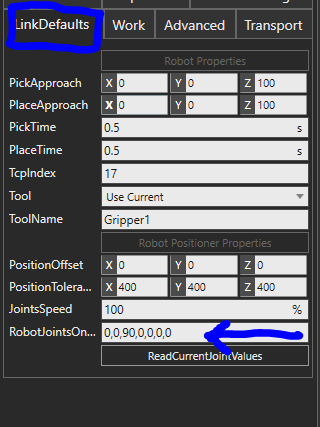
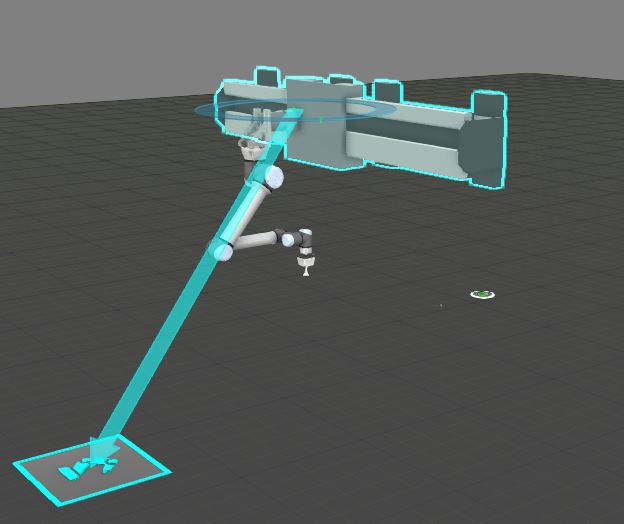
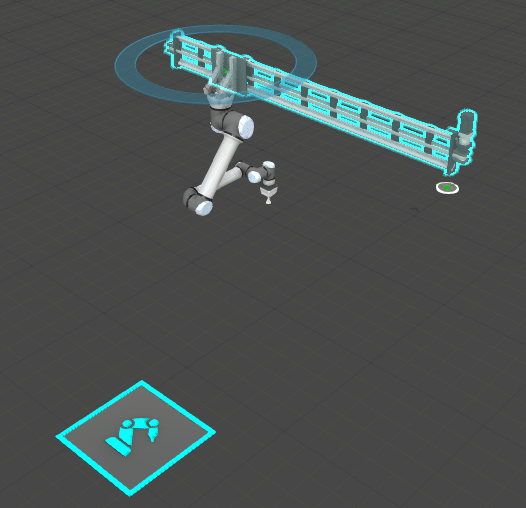
The position of the robot is really strange when the servo track moves from a to b. How can I adjust the position that the robot goes to when the track moves?
-
Since I am having in real the IGUS Drylin Servo Axis I thought it would be nice to have that implemented also in the simulation. However I cannot attach the axis to the robot controller. Does anybody know how to solve this?

Thank you very much and best regards!