Hey everyone,
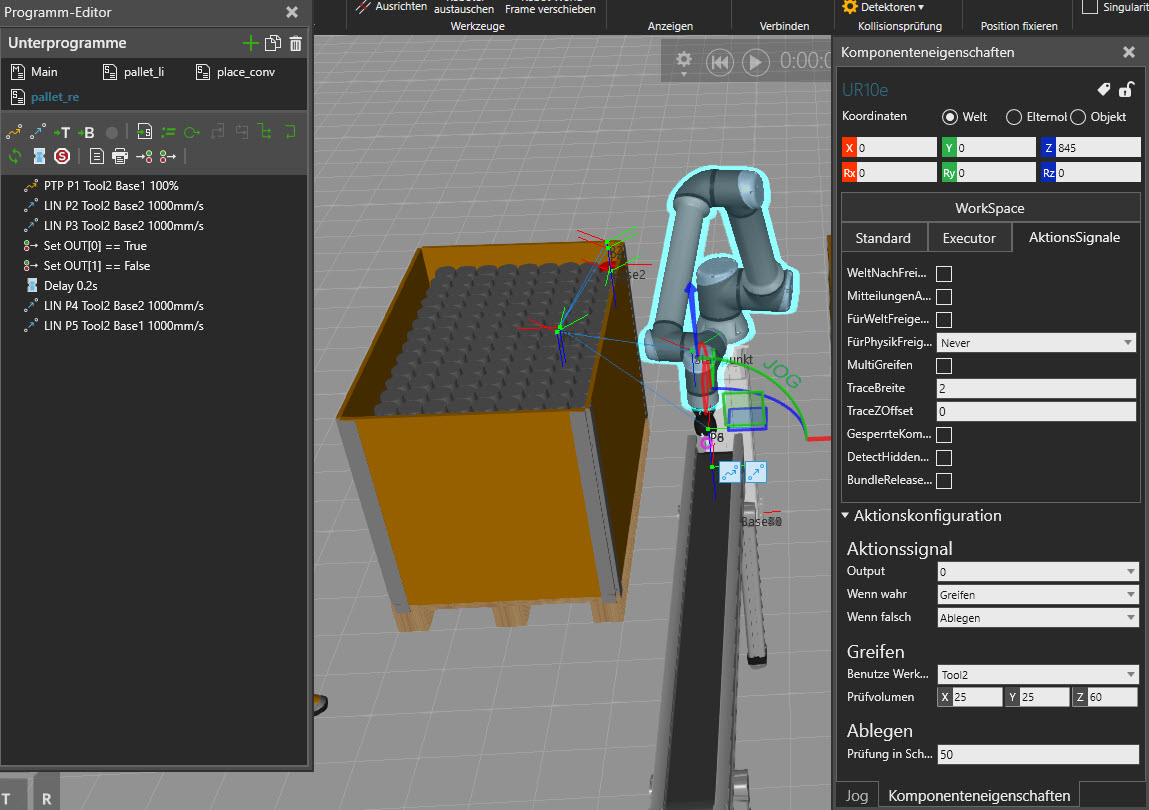
I’m a bit new in the VC world and started with my first robot simulations. Actually I’m working on a program where a UR10e should take parts out of a box and place it on a conveyor. As a gripper I’m using a Robotiq e-Hand. I got the robot in the program to grasp the part, put if I’ve moved it over the conveyor (or to any other place) to release the part, the workpiece stays inside of the gripper.
Any idea what I’m doing wrong?
Thanks in advance.
Andreas