I have 2 questions which would be great if anyone can help:
I’m struggling to work out how to control the speed at which a human works resource does pick & place tasks. This is using works process need & feed to direct the human, but there seems to be a minimum speed at which the human can pick up and then place a component on another works process.
I have tried increasing the turn and movement speed, but this doesn’t really affect the pick & place speed. The only thing i’ve found to speed it up is the motiontimemultiplier property, but this hugely slows the simulation down and feels like its not the best solution. Any help?
Second question is about documentation for using the tasks in the works process. I am struggling to find much help anywhere giving specific details on how to use all of the tasks in the works process (syntax, procedure etc). This ref guide is all I have found - https://community.visualcomponents.net/Portals/0/Tutorials/2014/WorksReference.pdf - but it doesn’t go into much detail on using the tasks. It would also be really useful to find out how much I can parameterise the variables, such as a conveyer length or component size, based on other variables.
the Works Human Resource has a note “PredeterminedMotionTime”. Here you can define the time used for pick or place at a certain Works Process and a certain Task.
A documentation of the Works Task is a widespread wish. We as a German reseller are providing a extra documentation for our customers, but only in German language.
Hi all, I am very new and noob with this VC software. I got the version 4.1. As a start, I went to follow the tutorial videos and everything went well with the robots and things. But it seems that the humans are stubborn. They simply wont do anything.
The tutorial was made using 4.0.5 and older version of Works. If you open the layout for the tutorial, you need to make these changes:
Use PnP to reconnect the robot to the track.
Select the Works Robot Controller either in 3D world or use the Cell Graph panel, and then in the Component Properties panel, set Configuration to FRONT ABOVE FLIPPED.
The Human won't do anything unless there is something for it to do, so the robot needs to pick and place something first.
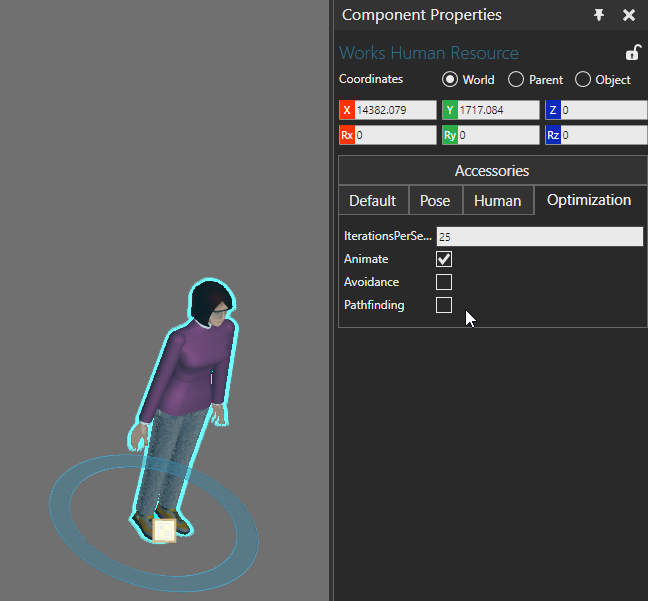
NB! If you are trying to recreate the layout using the latest version of Works library, the one in the 4.1.1 eCatalog panel, the Works Human Resource has a set of Optimization properties. Turn off Avoidance and Pathfinding if you are not using pathways and pathfinder, otherwise the human will not move.