Hello everybody,
so I am trying to use a human/resource to move my mobile assembly table from on point to another point within the 3d world. The human can interact with the mobile assembly table, since it is a tool resource. So in practice this means, that when I for example have one feeder and one sink the human can use the mobile tabel to move around the can or some other product. But that is not really what I am trying to do here.
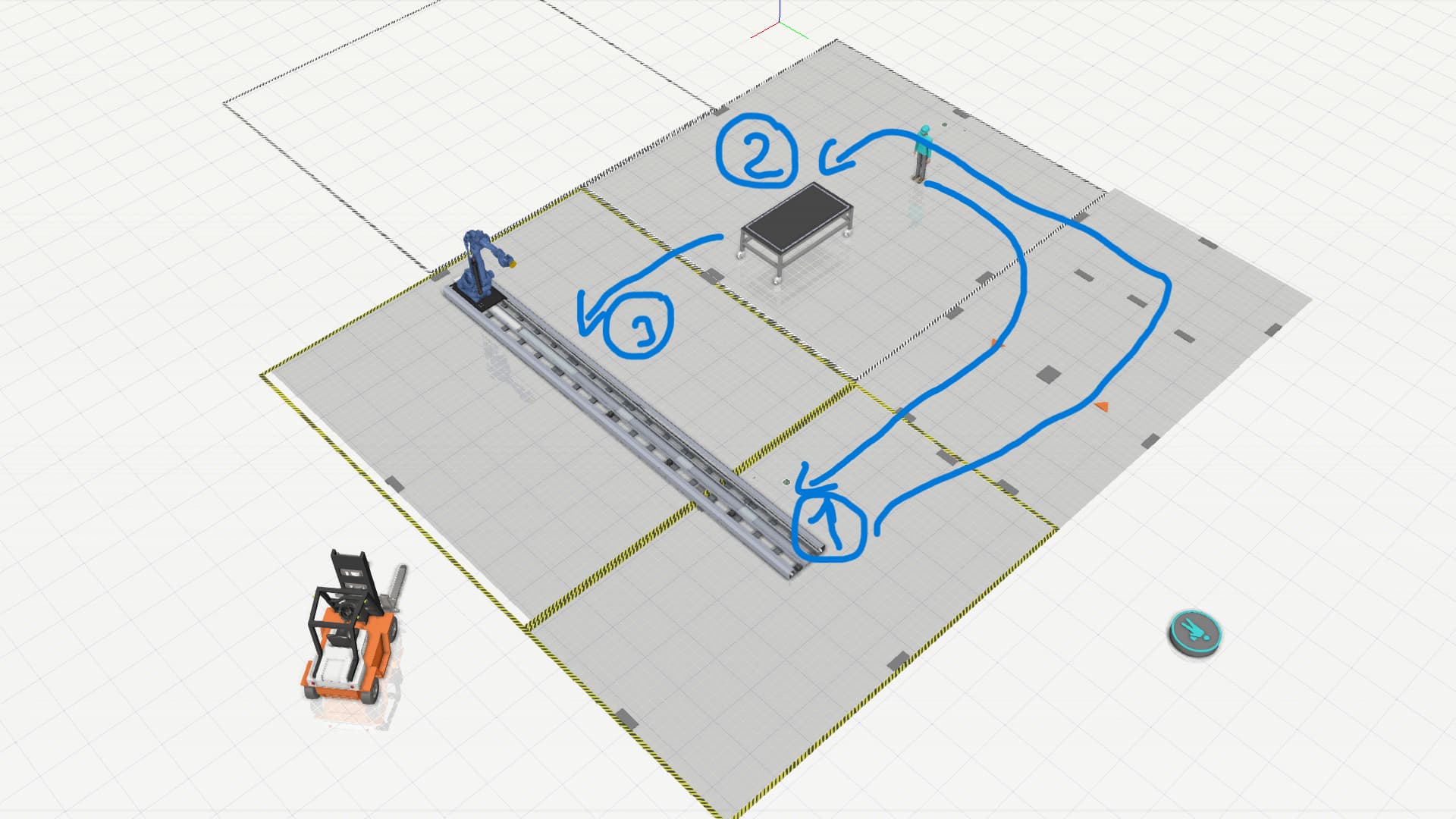
I would like the human to move the table from spot A to spot B and leave it there, so a robot can place parts on it. Aftwards, when the robot is finished and sends out a signal to the human the human is suppose to grab the table with the placed parts and move it to an assembly area for further manual assembly steps. After that the table is pushed back to the robot area and is placed in front of the robot, so that the robot can stack more parts on top.
Here is a very rough sketch of what I am trying to do.
If someone can help or knows where to look in the academy for such a case I would be very happy.
Best
maru