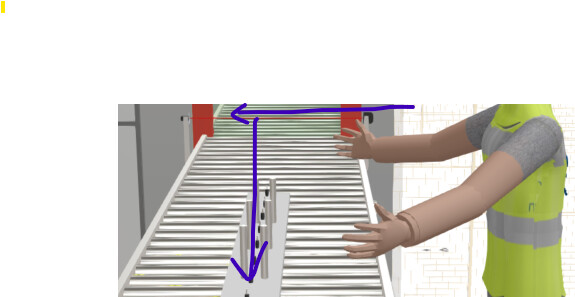
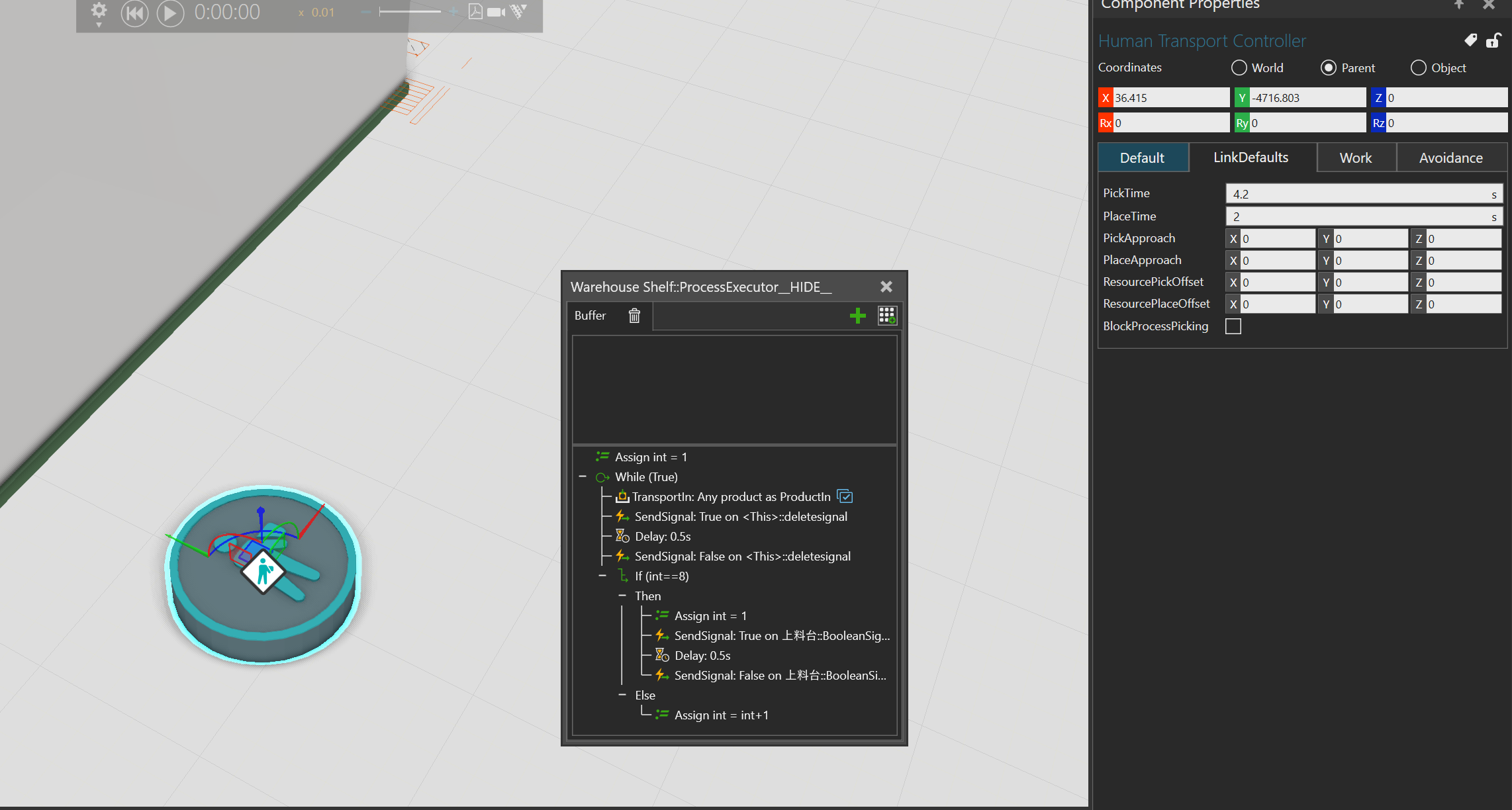
Hello. How can I customize human placing motion to avoid part collision with fixture,
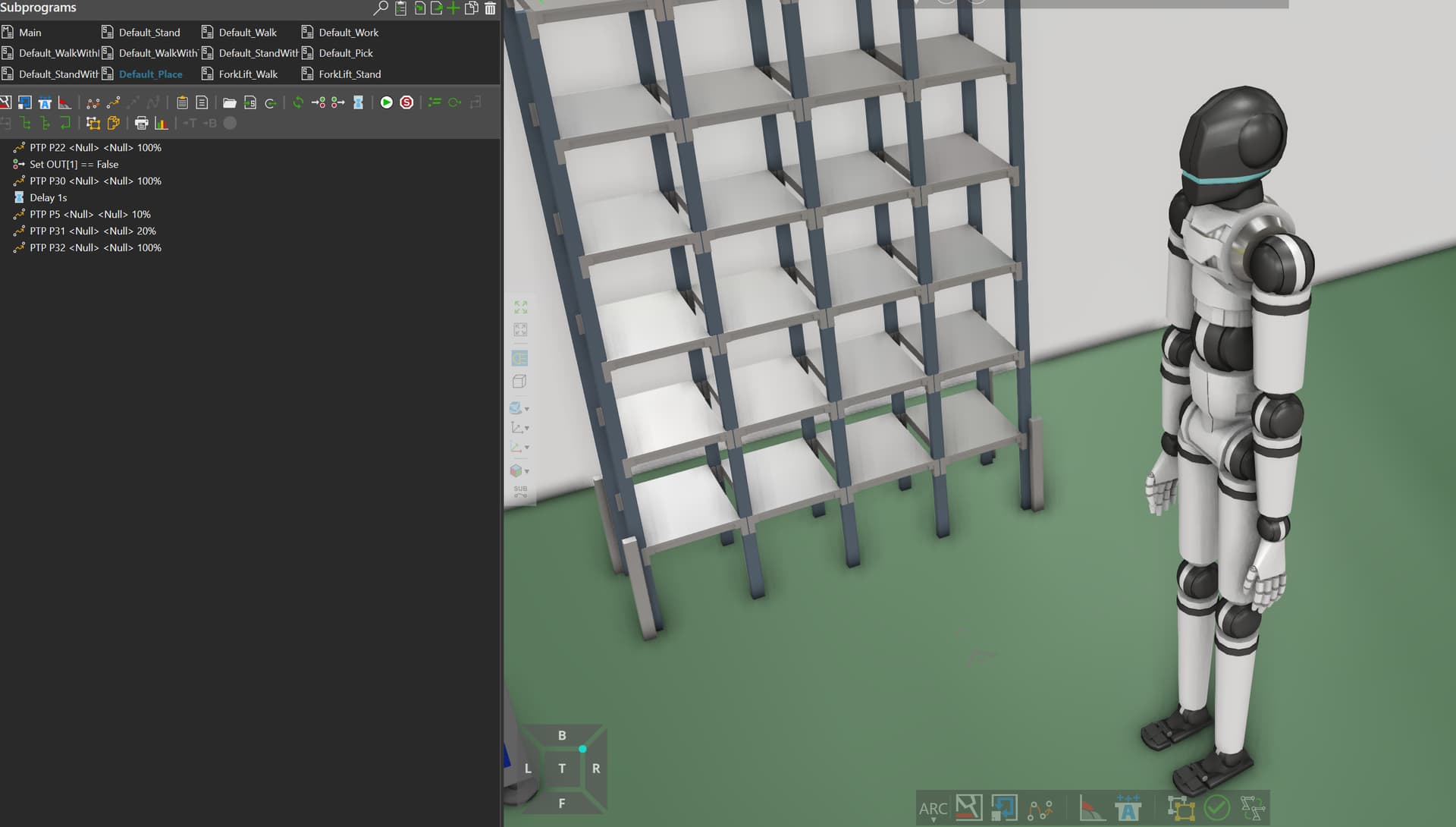
I’ve tried the _Place in Program tab . But the Place program only reads Max, one line of motion statement. If I add another line of motion statement, it doesn’t read it.
I haven’t used version 4.9, but I think they’re basically the same, and if, as you say, only one action is run, you can check the flow to see how long you’ve allowed that action to do.
Are you using Human (Adam) or (Adam-Beta)?
Because in Adam- Beta, even if I add a motion statement, the default placing motion overrides the customized placing motion statement that I added
If my memory serves me correctly, the robot model should be from the VC4.0 version, I just reapplied him to the new version of otto and modeled the joints for the fingers.