Hi experts,
Does anyone know how to swap a TCP with a collection task just after a delivery task in Process Modeling, as shown below?
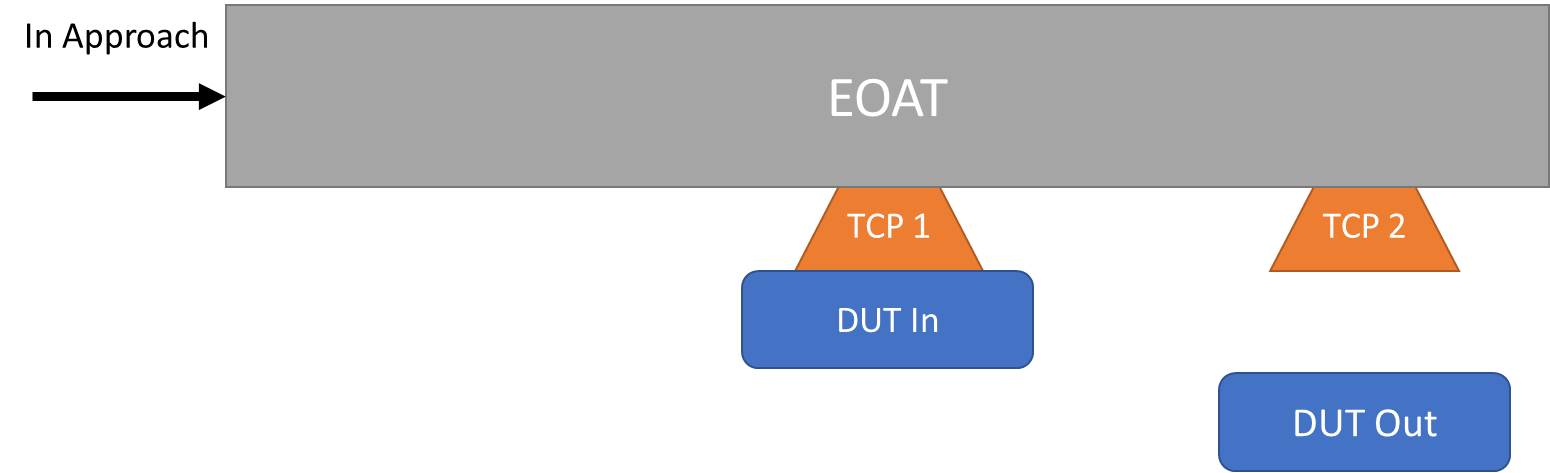
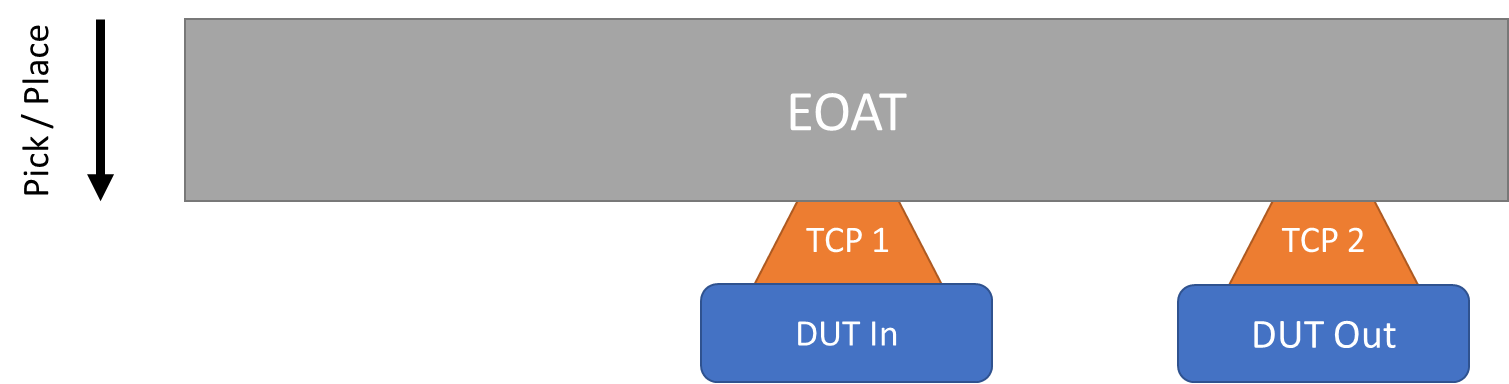
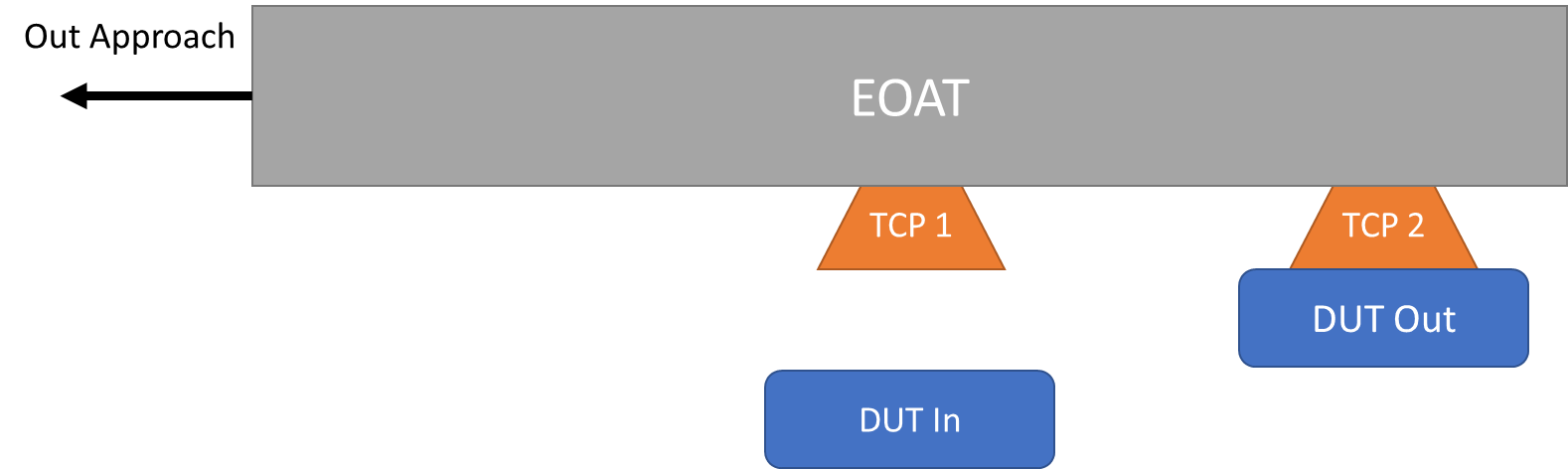
- set your 2 TCP at the correct position
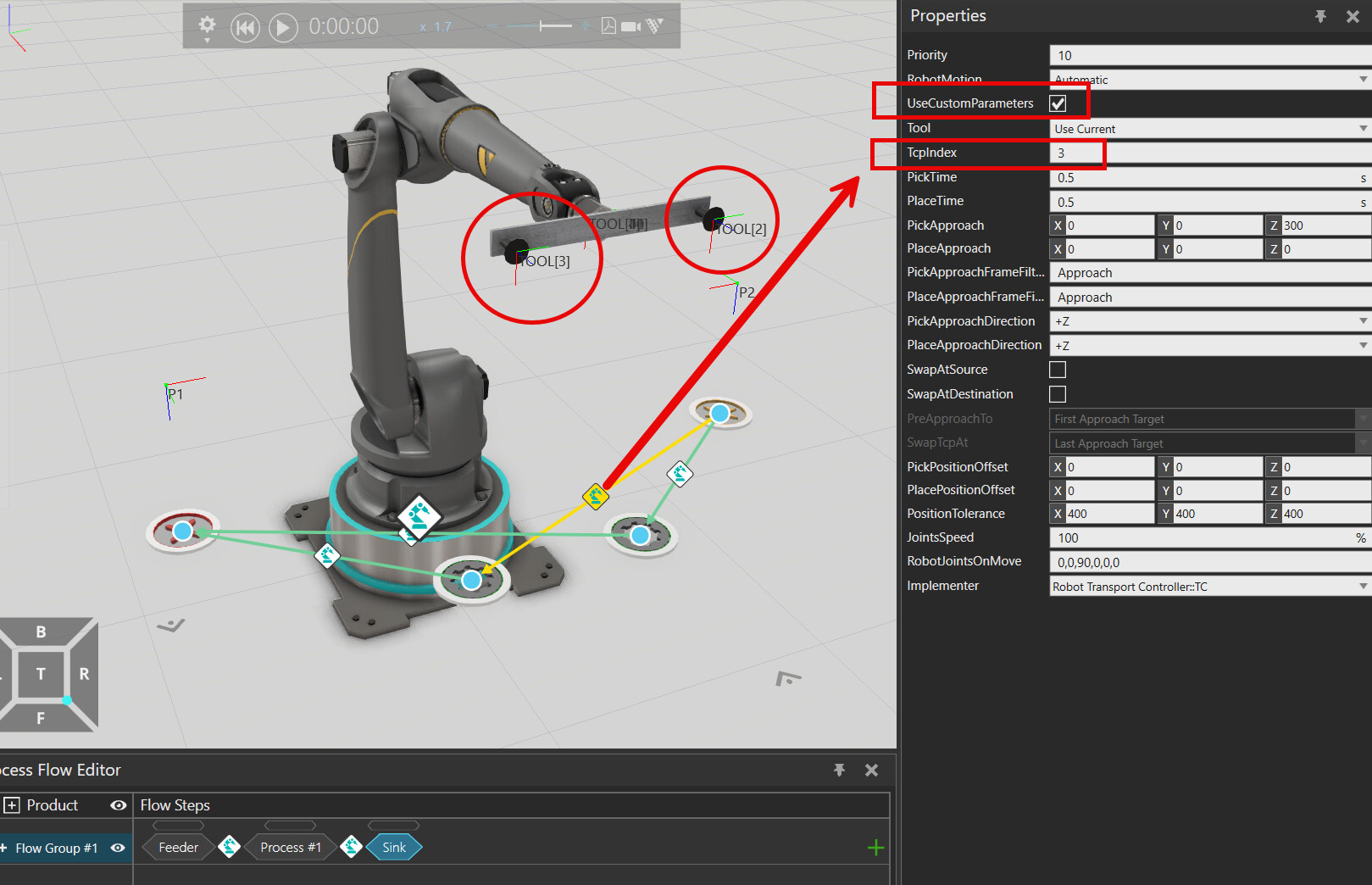
- in the TransportLinks, enable “UseCustomParameters”, select the correct TCPIndex for each position and set the Place and Pick Approach to and from these positions to 0.
- if the timing doesn’t match for both links you can add some signals
- if you want to adapt it a bit more, you could try using the * Record-Execute Routine method
Swap_TCP.vcmx (1.3 MB)