In my project I have a two-way AGV,it carries all things,but in works library that all agvs’ models are one-way agvs,and those simulations about agvs in those demos are not true to life.
How to solve this problem?
Thanks for your help in advance.
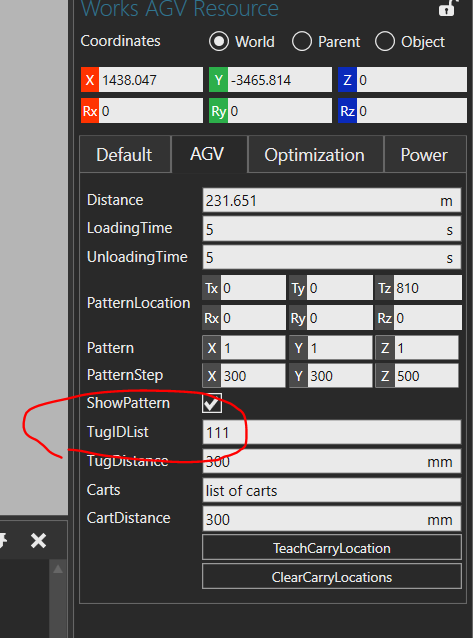
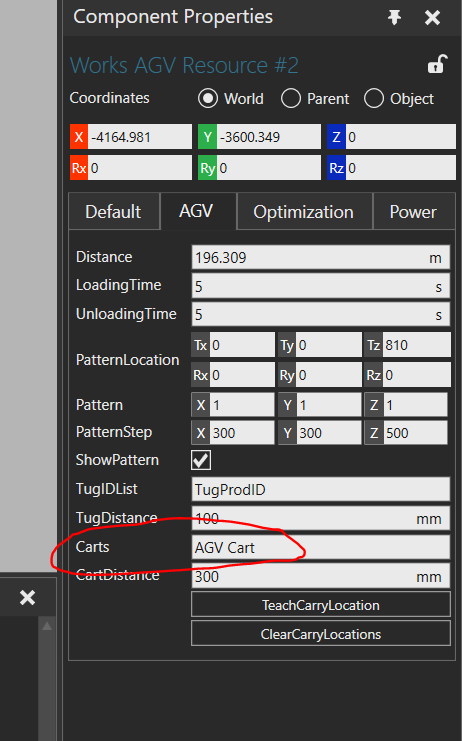
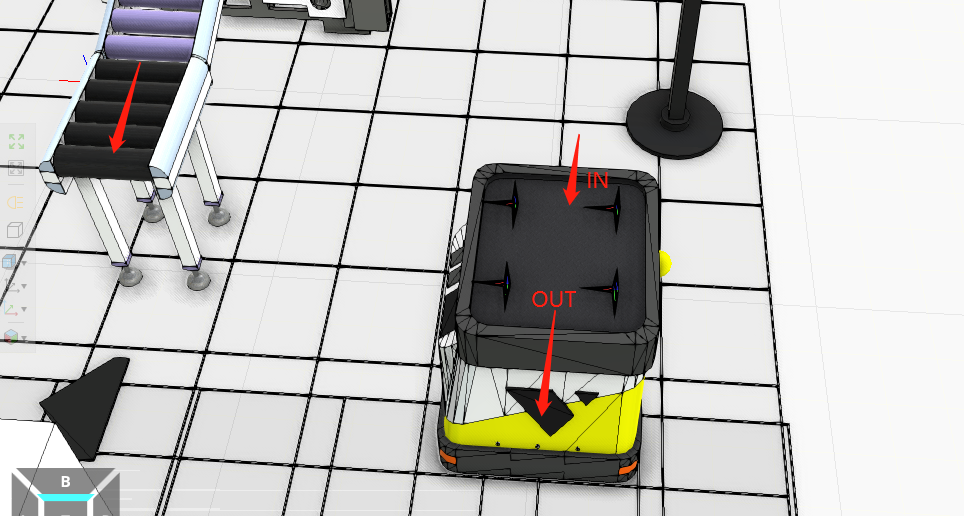
THANKS.Emm,look at this pictute,this kind of agvs goes back and forth in a straight line,not necessary to rotate.But in VC,I can not do it.How to set up this agv?
Please share if you manage do this. I had this same problem, but I could not waste time solving it. I did not use works pathway lane like Ozan suggested, so I hope it will work.
I managed to get AGV to go straight from A to B, but when it comes back to point A, AGV will rotate itsefl. Maybe there is a preset that front part follows the moving direction?
OK,I have solved this problem.Thanks to one of my net friends.
But I think it’s not correct way to run this agv.So strange!
Wish more users to enjoy VC.
Hy, I just found a different approach.
If you change the " def move(ToLocation, Closest = None, Linear = False): " function to " def move(ToLocation, Closest = None, Linear = True): " in the WorksBrains Python script, the mobile robot will always move linear between the target locations. (like it was constantly approaching the targets)
But be careful, with this modification the speed of the Mobile Robot will be the MoveSpeedApproach value all the time.
I don’t know what else this modification effects, but it worked for me.