Hello All, I trying to use dual gripper to pick and place in process flow, but it stop after 1 cycle, how should I fix it?
Dual gripper process flow issue01.vcmx (360.6 KB)
hi
With your logic “execute routine” for robot: you destroy the flow with transportIn and transportout statements
One approach might be to have a process above it as a waiting position, in the form conveyor process you can work with the flow statements to decide whether to go straight to “Process” or to “Wait” first.
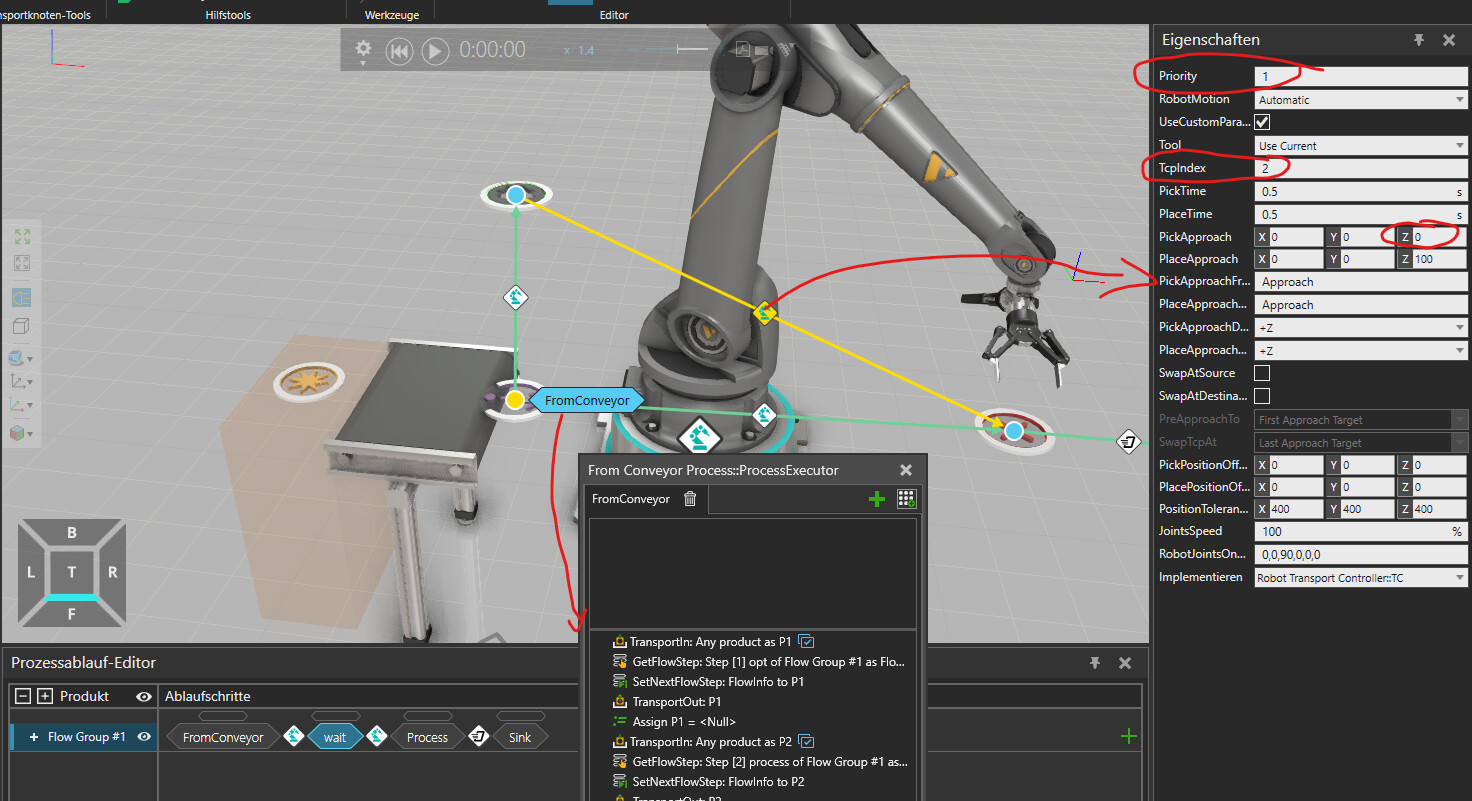
Also note in the transport links which tcp index is defined there, pick/ placeapproaches or priorities:
Dual gripper process flow issue01.vcmx (628.4 KB)
Dual gripper process flow issue01.vcmx (628.4 KB)