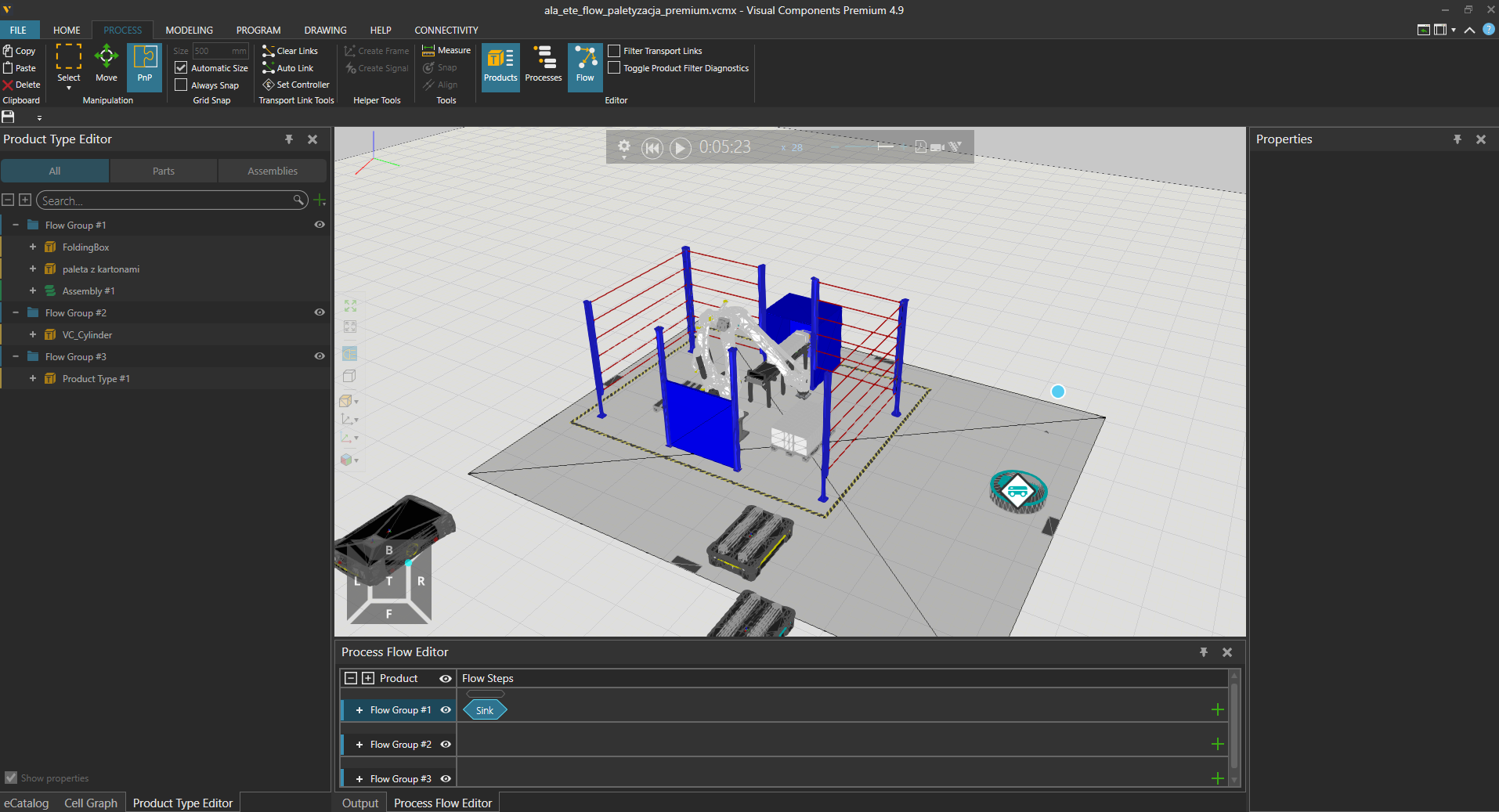
wants to move a pallet of cartons after the robot has stacked the cartons to another location using an autonomous robot. In the Process Flow Editor I don’t have the option to add a pallet with cartons, I only have a sink to which I want to deposit them, I can’t handle it ![]()

it can also be a pallet jack instead of autonomous robot - i have to do something looks like in that video: https://www.youtube.com/watch?v=z7r5l14CsxE
Hi,
it looks like you did a mix between Process modeling and Robot programming.
Either you use only Process modeling, then you need to use process nodes from the PM Flow Components file in the eCat to create the Assembly with the robot (and you robot should be controlled by a Transport Controller.
There are several videos about Assemblies in the Academy (How to complete an Assembly or Disassembly Task | Visual Components Academy) and a lot of examples in the Layout Templates of the eCat.
This forum post looks similar to what you want to achieve: Assembly / Disassembly without conveyor - #5 by juergenb
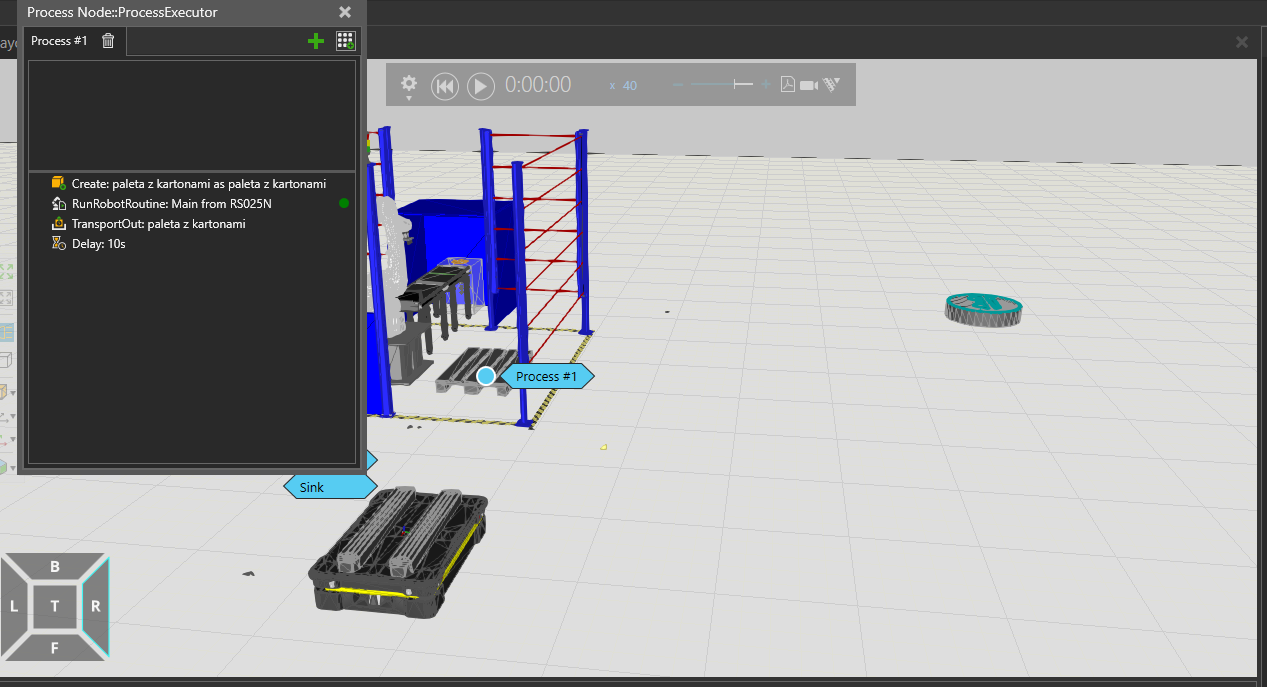
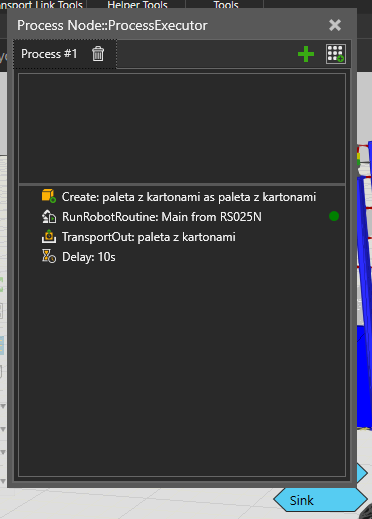
You can also do a mix of robot programming and PM, but in this case, you still need to create the pallet with a process node, or the mobile robot won’t be able to pick it. Here is an exemple :
Layout_PM_and Programming Mix.vcmx (2.0 MB)
2 Likes
Thank u very much for Your response!
rs25_paletyzacja_test.vcmx (799.3 KB)
That helped me a bit but I still can not figure it out. I dont know how to do it in a easiest way. Why the mobile robit cant pick up the pallet?
Have a look at the layout I sent you (“Layout_PM and Programmin Mix”), it shows an example of how you can do it.
- You have to create the pallet with a create statement in the process, otherwise it’s not a Product and the mobile robot can’t pick it up.
- To wait until the robot finished loading the pallet before picking it up, you can either use a “RunRobotRoutine” statement like I did, to call a Subprogram / Sequence, or you can create signals in your process (in the Process Tab, there is a function “Create Signal”), connect them to the robot and use them in your program.
- Your Mobile robot is not connected to the Transport Controller, so you need to connect it (with the Interfaces or directly on the Transport Controller : “Connect All Resources”)
1 Like
Hi. thank You for your time ![]()
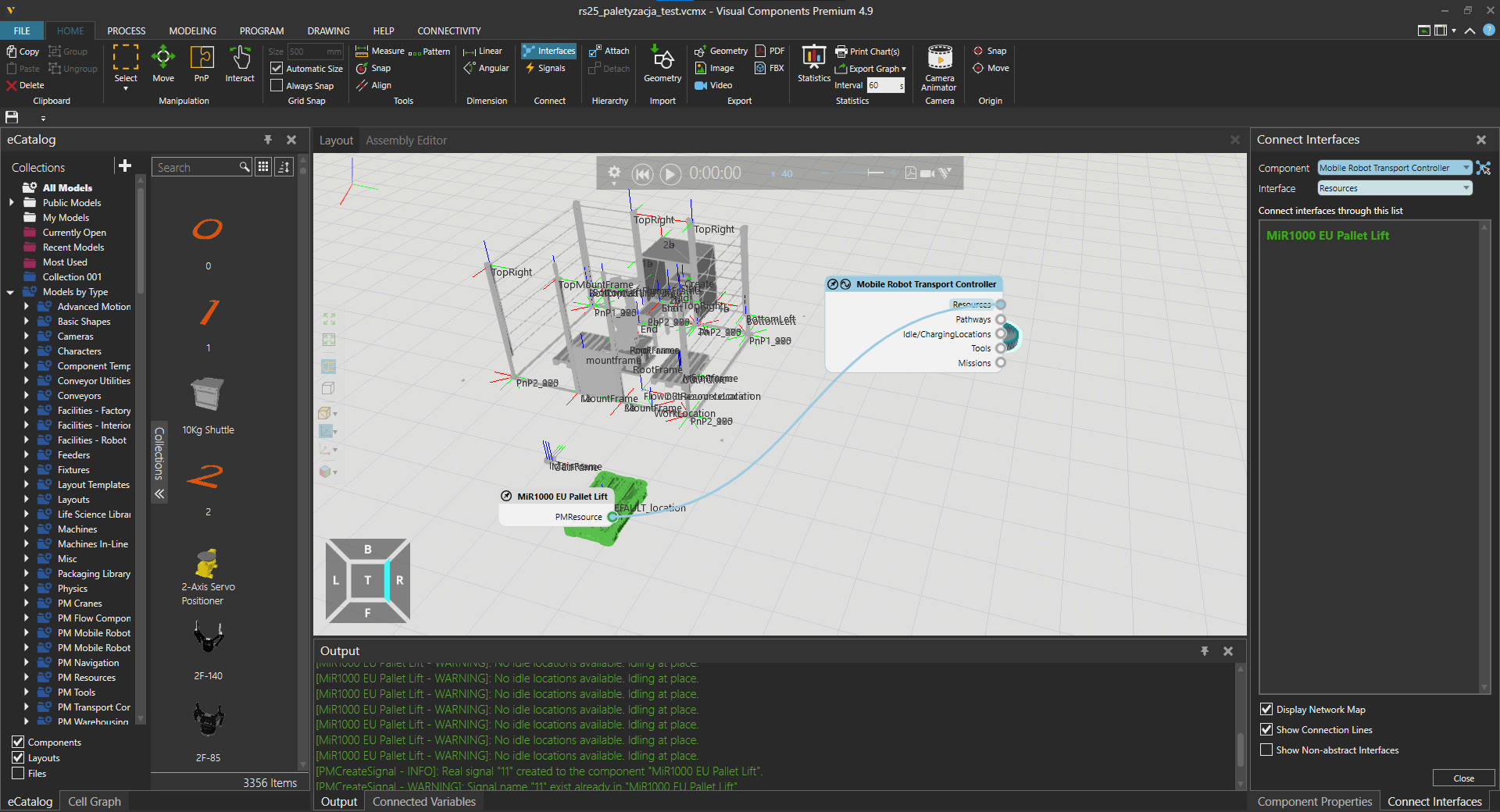
i have a connection between mobile transport controller and mobile robot
I created a pallet with creae statement
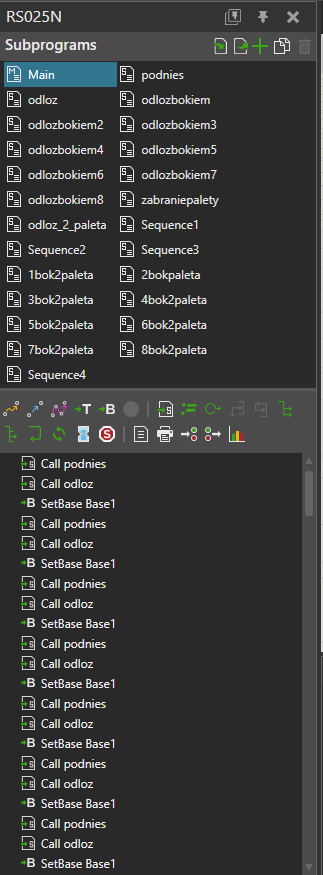
but i didnt know which exacly routine should i picked because my program is a little bit messy if I can say that. And a have a lot of routines.
rs25_paletyzacja_test_08_22.vcmx (828.2 KB)
thank u for your patience and a quick response.
This might be a better solution for you then.
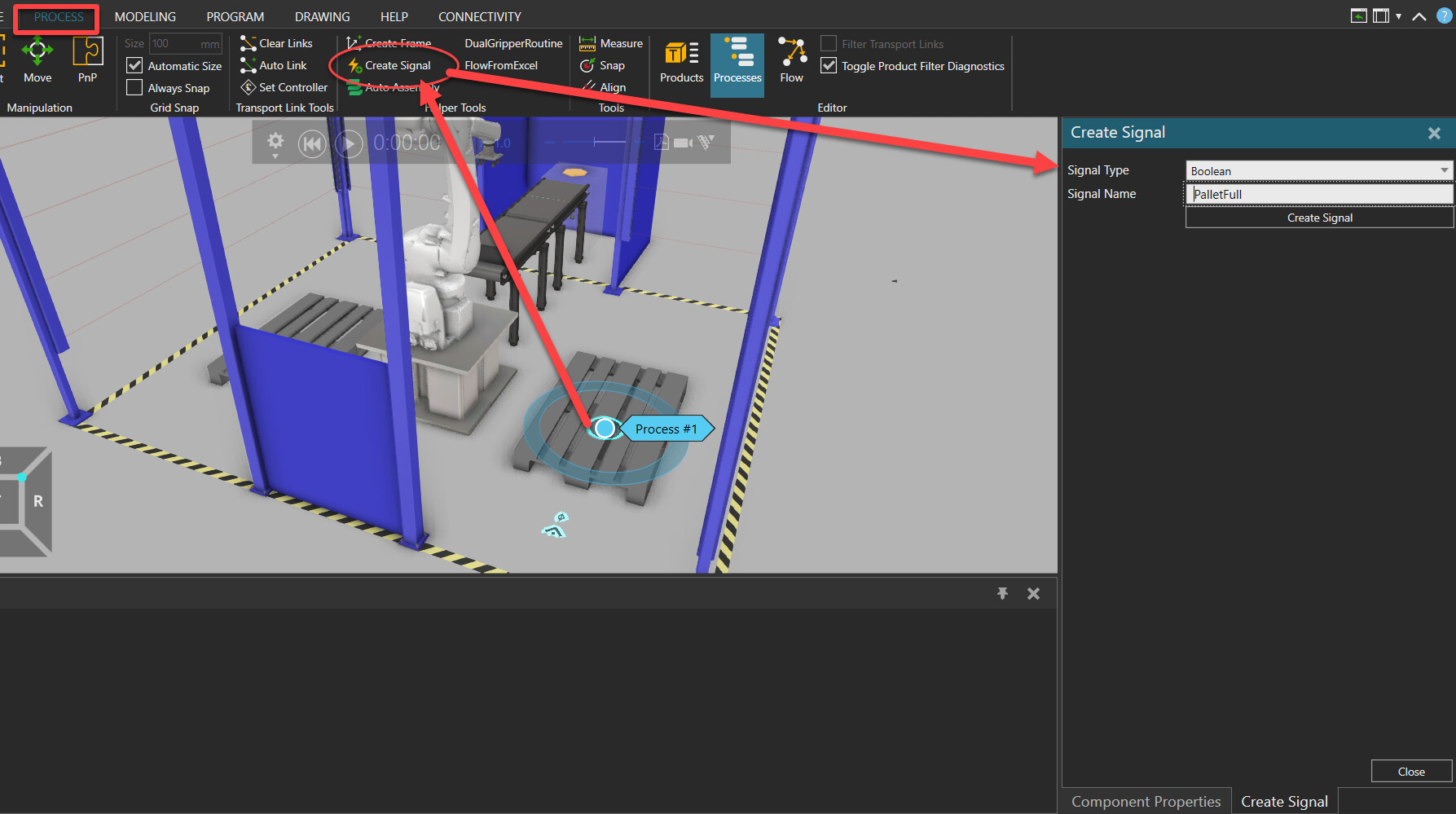
You can Create signals, for example, one for when the Pallet is full and should be picked up by the mobile robot, and one for when a new empty pallet is created, so that the robot can start to place pallet on it:
You can add SendSignal and WaitSignal statements in your process, instead of the RunRobotRoutine:
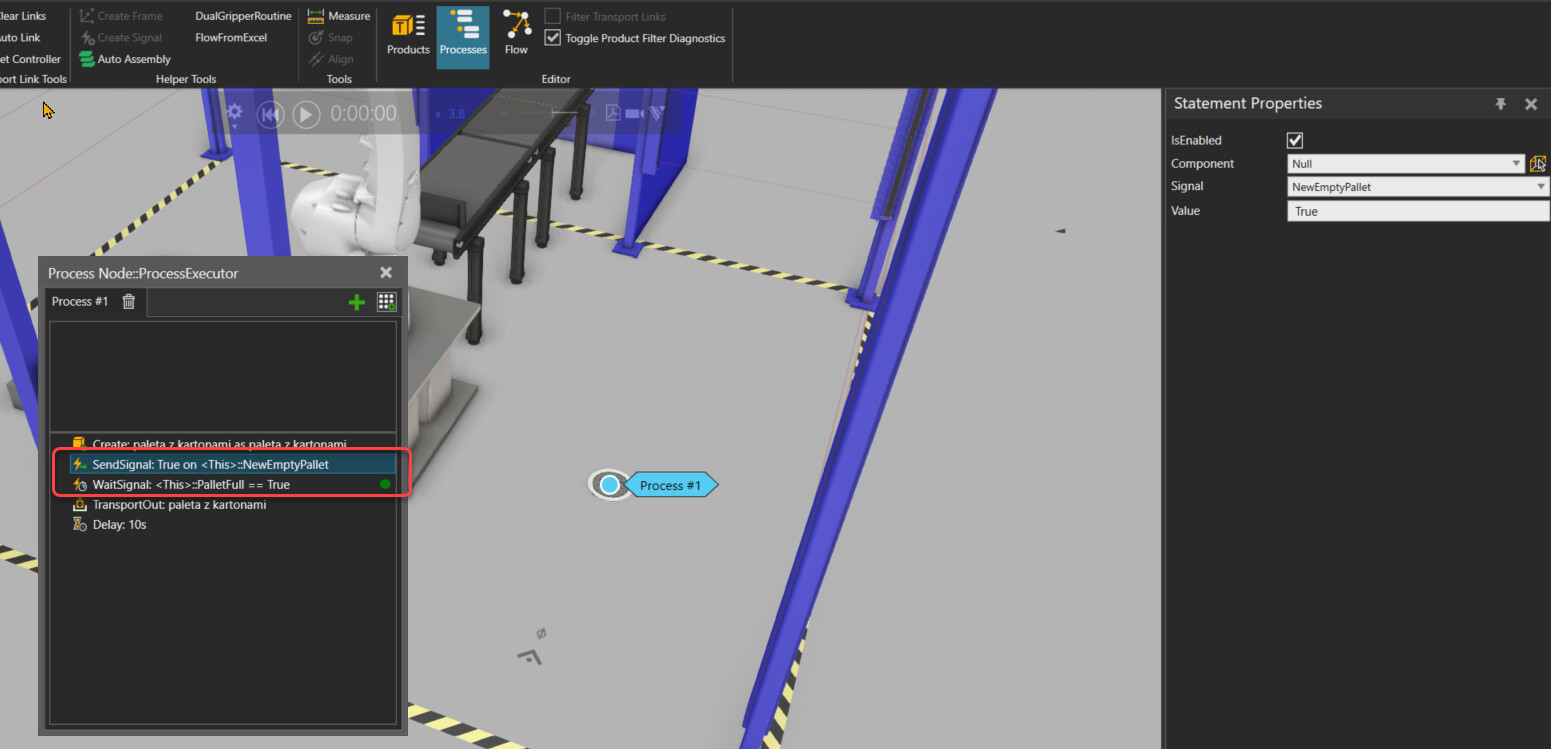
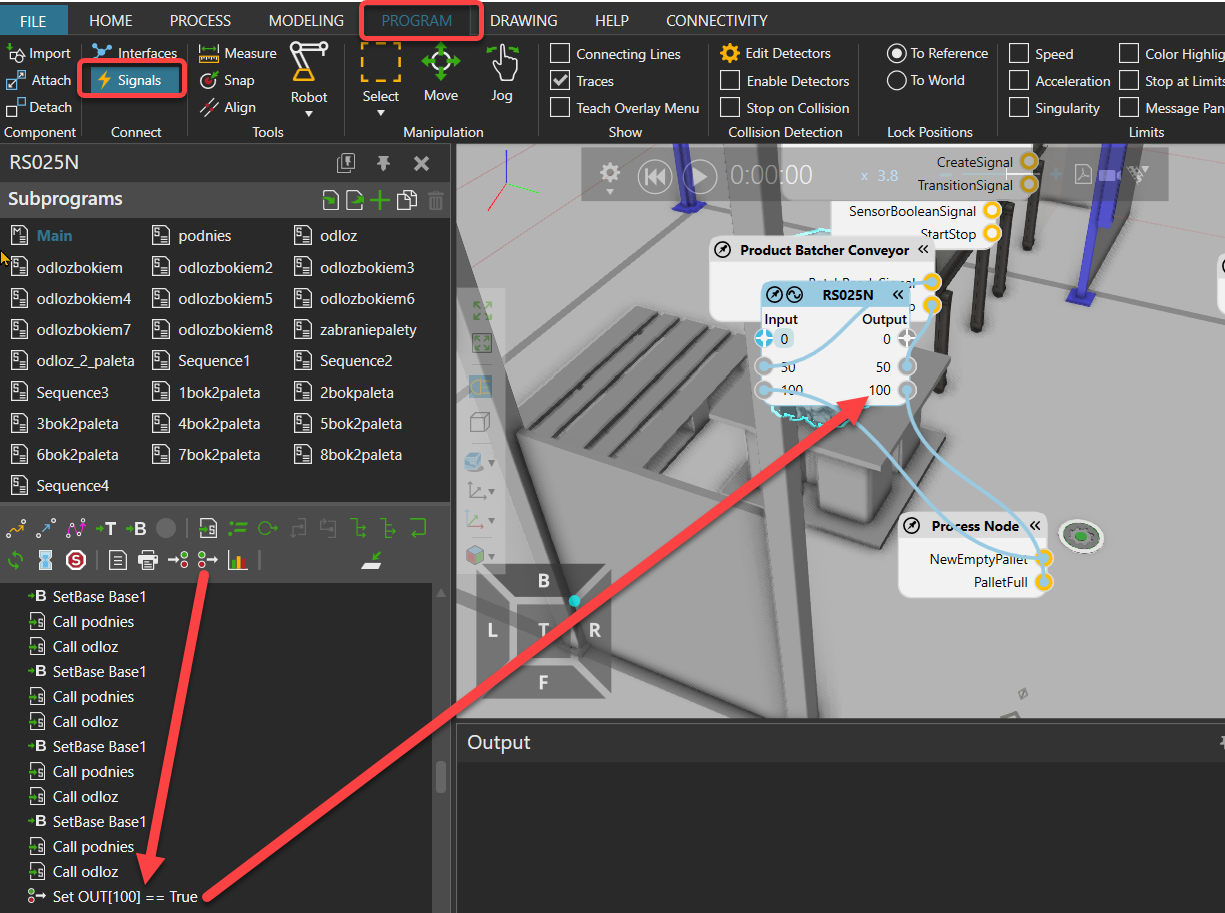
Then you can connect the signals to your robot, and add statements in your program (for example: wait for an empty pallet at the begining and then send a signal when the pallet is full)
Don’t forget to either delete the pallet, or uncheck the “IsVisible” property, otherwise the boxes will be attached to it, and not to the pallet created by your process
1 Like
thank you! finally the mobile robot is moving! but now i have another issue…
The mobile robot isnt taking this pallet but the created one and also it is going underground - Can I somehow make it take the palette off the ground and not ruin the entire code? (by changing the spatial arrangement of the palette).
rs25_paletyzacja_test_08_22.vcmx (742.9 KB)
I guess I need to change the robot? maybe on a pallet jack (I don’t care now what exactly will take these pallets - but I really want something to take them, preferably so that first one when the robot finishes putting the boxes on it and then the second one when the robot finishes putting them on the other one. I’m sorry that I write so much but I care about it and I think I’m already close to the end, thanks to your help… best regards
The pallet will be created on the MainFrame of the process, with the same orientation as the frame, so you should place your process accordingly. It’s best to keep the coordinates on 0 on the Z axis and just change the conveyor height.
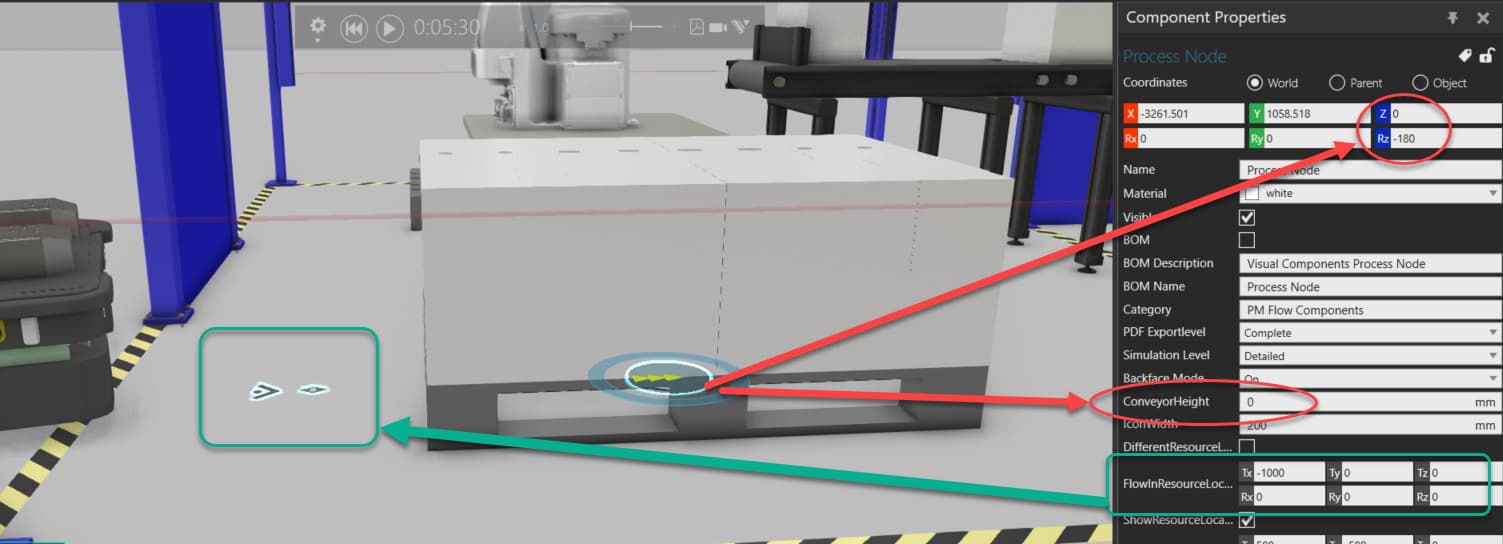
The mobile robot (or human if you want to use a pallet jack) will place itself on the ResourceLocation or FlowInResourceLocation frame to pick up the pallet. So you can also change it, so that the resource places itself where you want
1 Like
Thank YOU!
taking the first pallet works great! now I did the same with the second one, but unfortunately the mobile robot does not want to take it - this is my last problem and question
rs25_paletyzacja_test_08_22.vcmx (791.0 KB)
after which I can close the thread, but thank you - today is a fruitful day
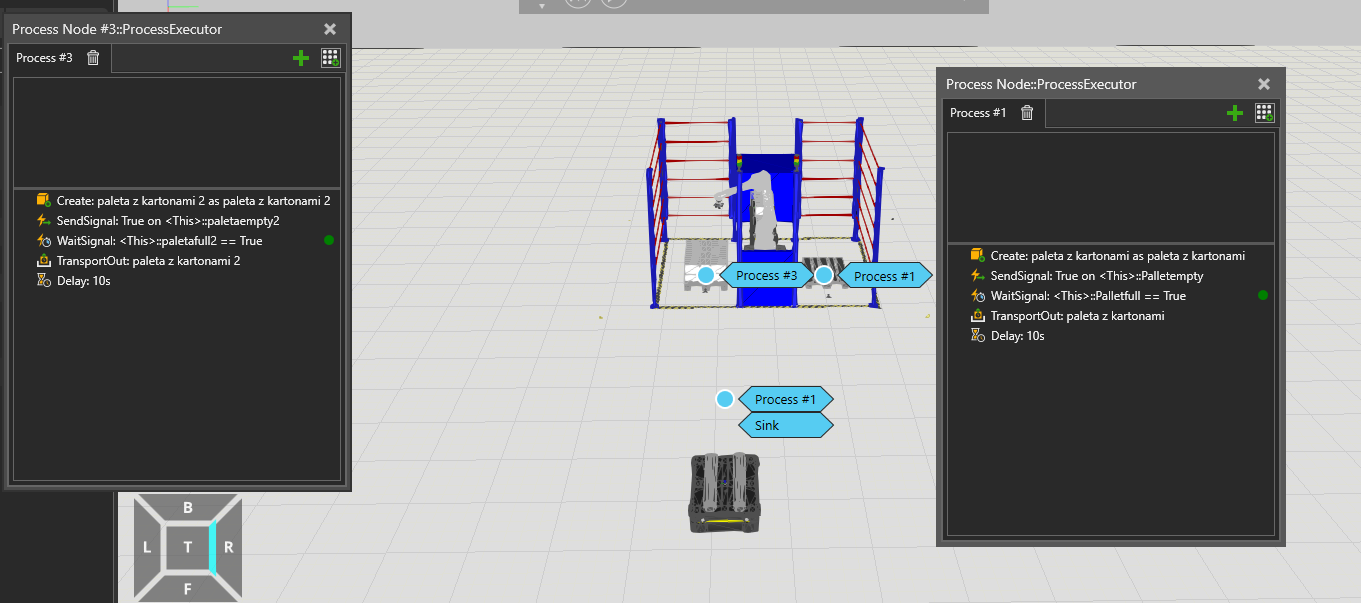
You didn’t edit your flow, you need a TransportLink between the Process #3 and the Sink.
You can add it as a parallel flow