I’m going to make a weld visualization by using “Swept Volumn”. I need to modify some of the action properties frequently, I want to config the action in the background by C# ,instead of manual configuration. I tried to find the relevant interface, but failed.Does anybody know how to do that?
The implementation of actions is not hardcoded but in theory can be anything for each component separately. The common robot actions are defined and implemented by “ActionScript” Python script found in each robot component, take a look at its implementation.
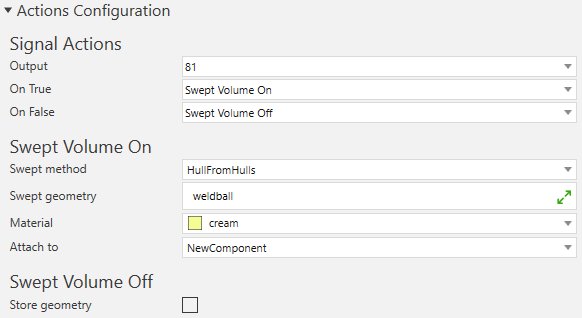
The actions themselves are stored in IActionContainer behavior and are represented by ISimAction that also implements IPropertyContainer. All the action specific properties are created dynamically and are accessible through that IPropertyContainer interface as IProperty objects.
Is there a way to quickly remove all the signal actions attached to a robot component’s outputs.
I need to use the early outputs 1-256. but is very tedious to go in and disable every signal action for the initial 100 outputs. for every robot I have.