I have been contemplating a particular issue for several days regarding the modeling of certain institutions. I’ve encountered some discrepancies between different tutorials, which has led to confusion. I am reaching out to seek your expertise and guidance in clarifying these matters.
I have attached the relevant pictures and documents that illustrate the institutions in question. Specifically, I am interested in obtaining information and resources that can help me understand the mechanics
I would greatly appreciate it if you could provide me with any links or references that could assist in this endeavor. Your assistance would be invaluable in advancing my understanding and resolving the discrepancies I’ve encountered.
Thank you for your time and consideration. I look forward to your response.
I think you should get trouble in that only one joint could be follow. I define property A1 to get angle of arm1, and property A2 for arm2. In OnSimulationUpdate event, read arm1 and arm2 joint VALUE and update to property A1 & A2 as following python script. #python script
from vcScript import *
comp=getComponent()
Joint1=comp.Children[0]
Joint2=comp.Children[1]
Link1Value=comp.getProperty(“Angle1”)
Link2Value=comp.getProperty(“Angle2”)
servo=comp.findBehaviour(“ServoController”)
def OnSignal( signal ):
pass
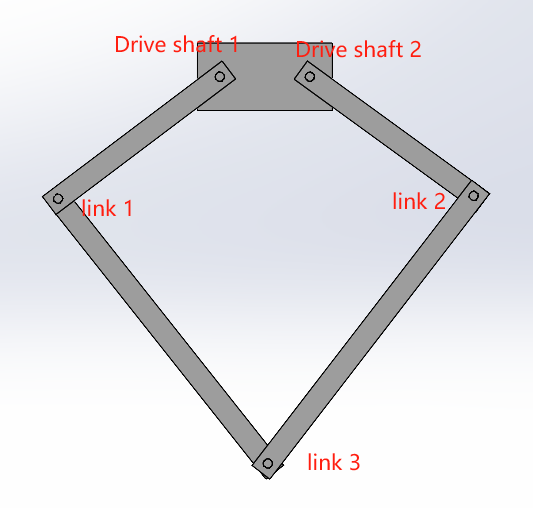
Then we use expression to get angle of Link1 and Link2 as your picture
A=degree(sasasa(450,radian(Angle2),200,radian(Angle1),450) + sssa(750,L,750))
B=degree(sasasa(450,radian(Angle1),200,radian(Angle2),450) + sssa(750,L,750))