I’m looking for optimizing the movements of three robots. The case can roughly be described as so:
Robot A does some sort of depallitizing for products undergoing inspection.
Robot B packages it and repallitizes it after the inspection. The whole process is in a u-shape, therefore is robot C placed inbetween A and B. Robot C moves the packaging from A to be reused at B.
The point of my simulation is to figure out how to avoid bottlenecks, hence that robot C at some points of the process has to be two places at a time. I’ve got pretty tight space constraints, therefore my initial thought was to robot-programming-tab of VC, thereby I can precisely control the movements of the robots.
I need robot C to know whether it at any point should help either A or B, to minimize delays.
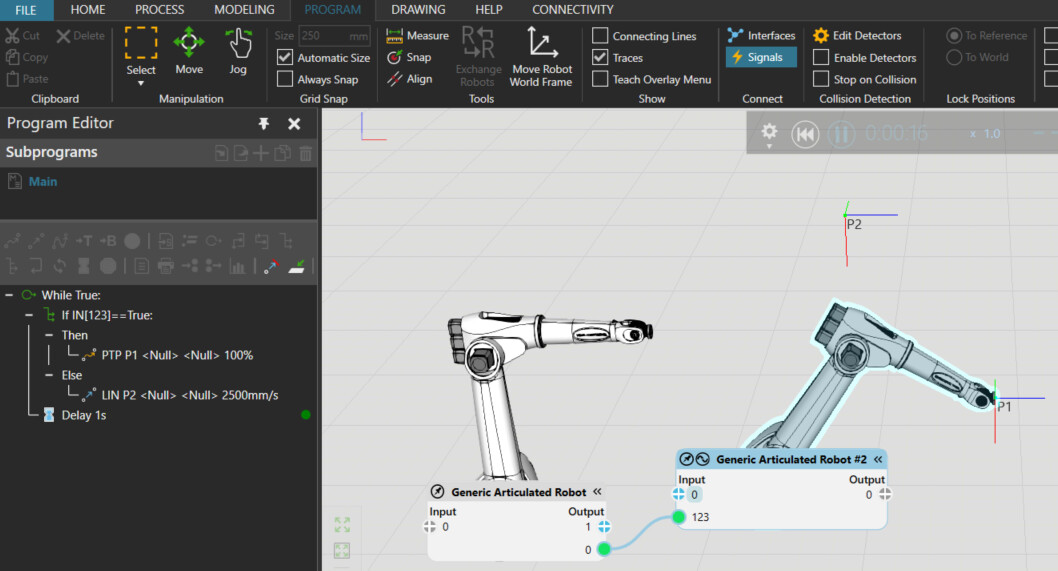
Should I either forward the issue to one of my python experts - or is it possible to solve through programming tab? I’m hoping somehow, that it is possible to let the robots communicate through targetproperties/valueexpressions/counters/if-or-while-loops, without the use of: python-programming, sync-statements, waittriggers and so forth ![]()
Thank you in advance!