Hey guys! Hope you’re doing good!
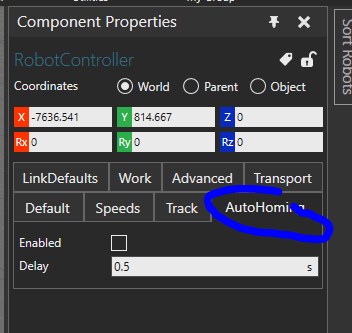
I just wanted some help in making a robot return to its home after it completes and pick and place operation. It only moves till it has the next transport instruction but not otherwise. I also tried adding a “home” subroutine in a process node but it does not execute that.
Can someone please help me with this?
Thanks in advance.