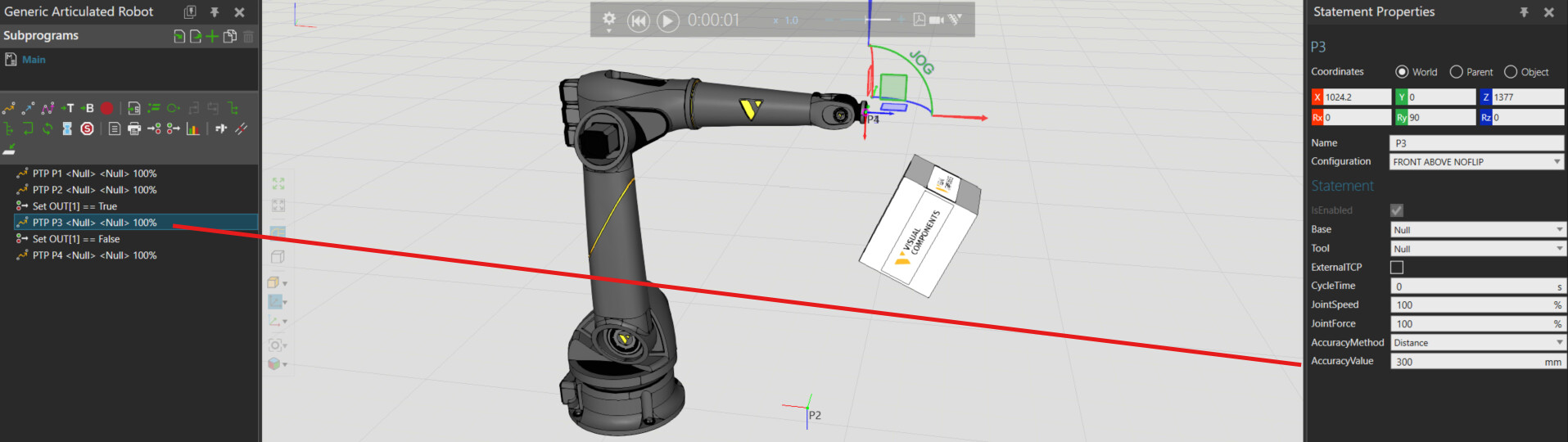
I want my robot gripper to release the part 150 mm before reaching the target position, but the product should reach the target place by itself after release.
What is the best way to achieve this in Visual Components?
Please share if you have a simple example or idea.
Or if you are using Process Modelling, you could have a process node 150mm above the target process. The robot will place the product in the upper process and an Interpolating Transport with a reduced transport time can be used to make the product go into position.
You can hide the process during the simulation with the property “ShowWhenSimulating in its property panel.
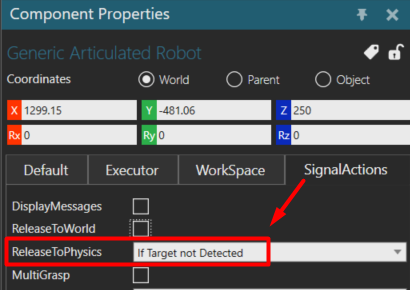
Now I can make the pallet behave as a physics object, but when the assembly is removed in the sink, only the pallet was removed — the boxes remain. Please help me fix this.