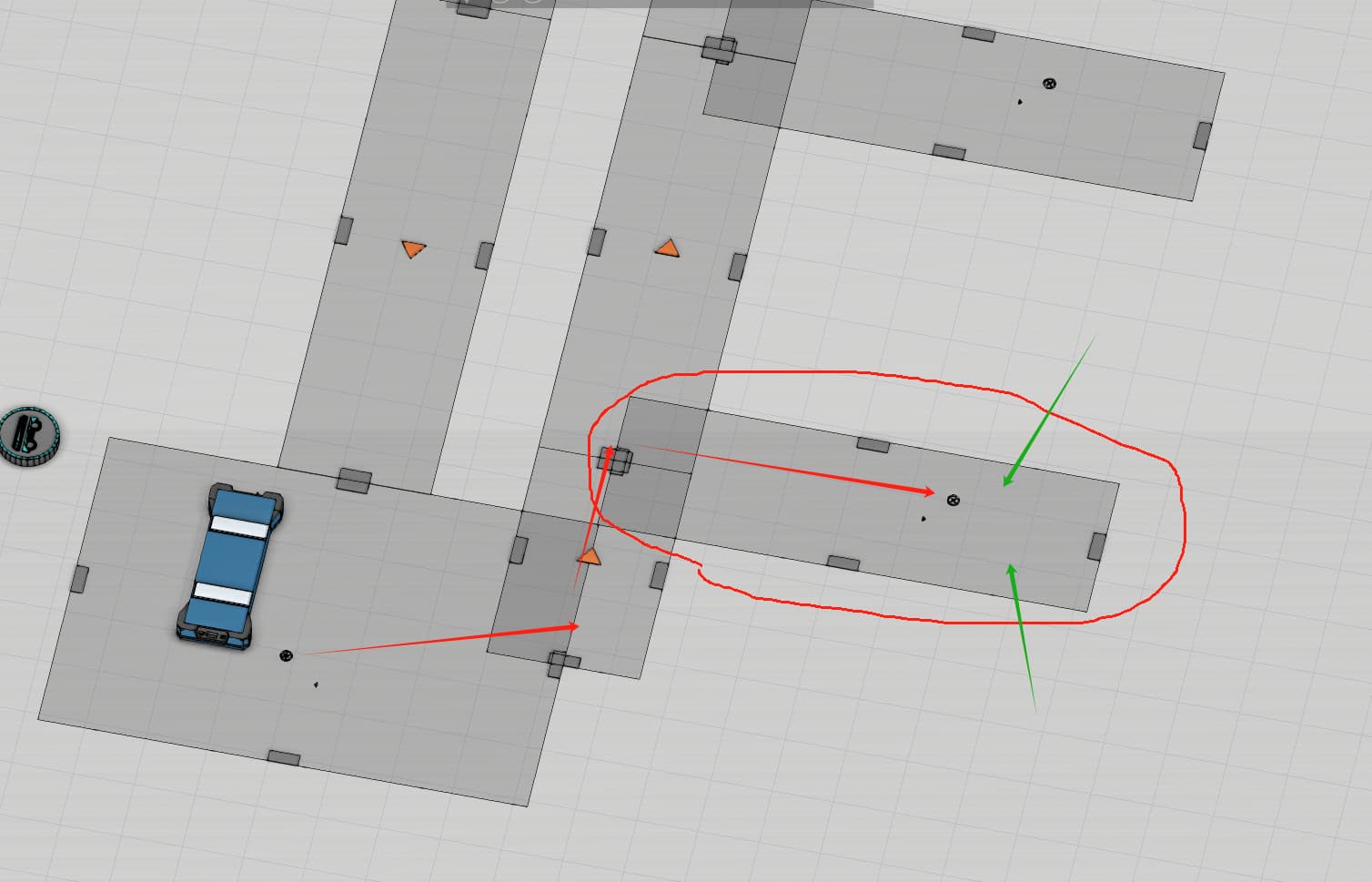
How to make AGV move forward into the path marked by the red circle and then back out?
A quick hack could be to increase the resource location offset. The default is something like -500, so you could move it to -3000 or similar.
A quick hack could be to increase the resource location offset. The default is something like -500, so you could move it to -3000 or similar.