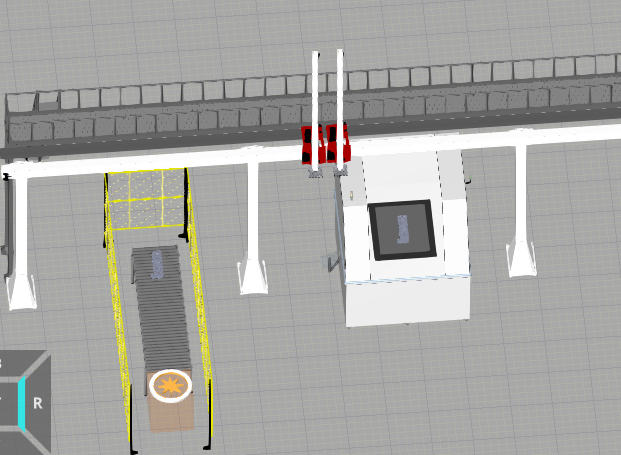
My robot has two handles. In machine 1, the priduce has been processed, and there is already a workpiece in from Conveyor.
step1: one of the robot handlers(handle1) needs to grasp the part of from Conveyor first (Part 1).
step2: robot move to the machine1
step3: handle2 pick the finished part (Part 2).
step4: handle1 place part1 on machine1,
The next machine step is similar. How do I implement this function?
It seems that the robot does not go to the from conveyor until I remove the part from the machine1.
New layout.vcmx (12.9 MB)
If I understand you correctly, this seems to be a normal phenomenon for Flow. When you use Flow, TransportIn and TransportOut usually appear together, especially when there is only one Flow. You can check your ‘FromConveyor 01’ node and ‘Machine 01 (OP 100)’ node. Obviously, when the Machine is processing, it is not in the TransportIn state, so your gripper will not pick up the components on the conveyor belt. This situation will continue until the end of the Machine processing, that is, when the Machine enters the TransportIn state. will continue to act.
The normal process is as you say, but what I need is to modify it into the process I need, could anyone help?
Maybe just a StartTransportIn before your TransportOut could work…
Otherwise what I often do in this kind of process, is to add another process node next to the machine, where the robot will wait with a product (Just a TransportIn and TransportOut should be enough if the robot doesn’t have other tasks).
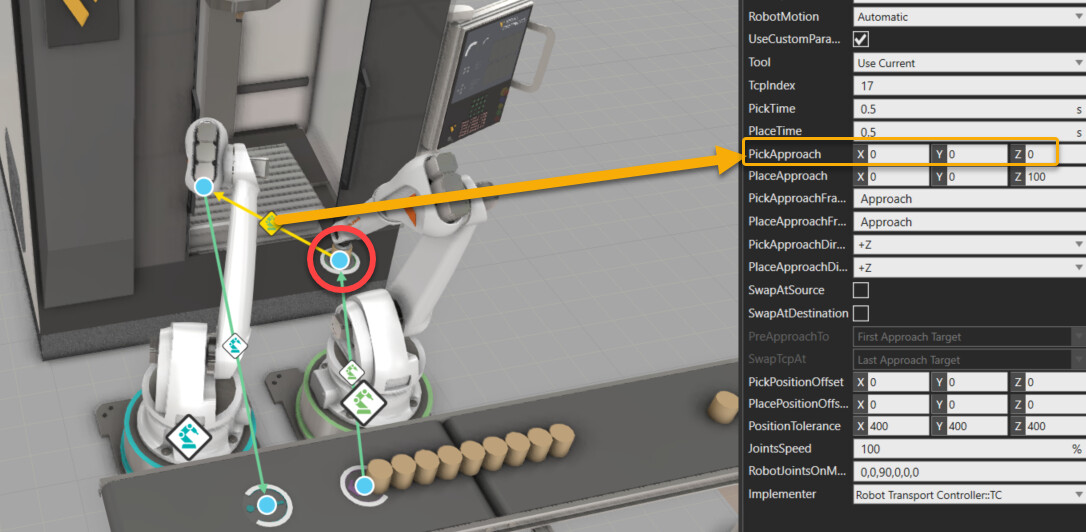
Don’t forget to set the pick and place approach offset of this process on 0.