Hi,
I am dropping part into a euro pallet from conveyor i want to create a pattern but I don’t want to do it in work process or process node(Transport in pattern) because i have to do virtual commissioning also. Does anyone know how to do that?
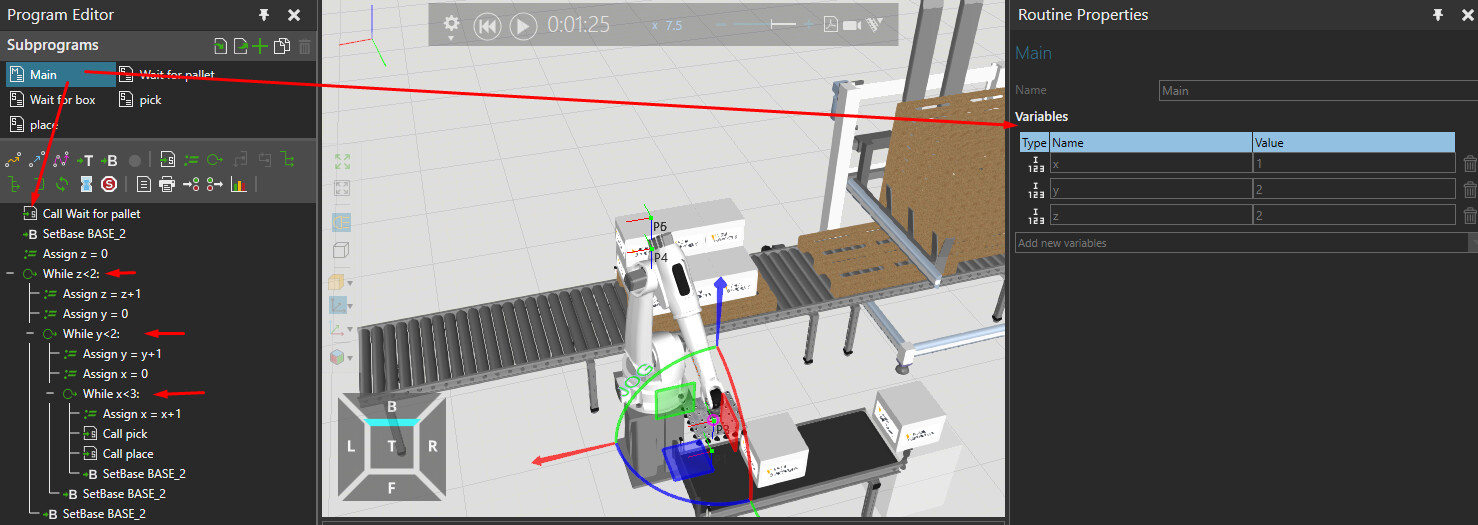
Implementing a pallet pattern with just robot programming is usually done with nested while loops and counters.
Define a reference coordinate (base) and then move that base with each iteration.