i know how to create tranistional and rotational joint, is there any way to create a ball joint?
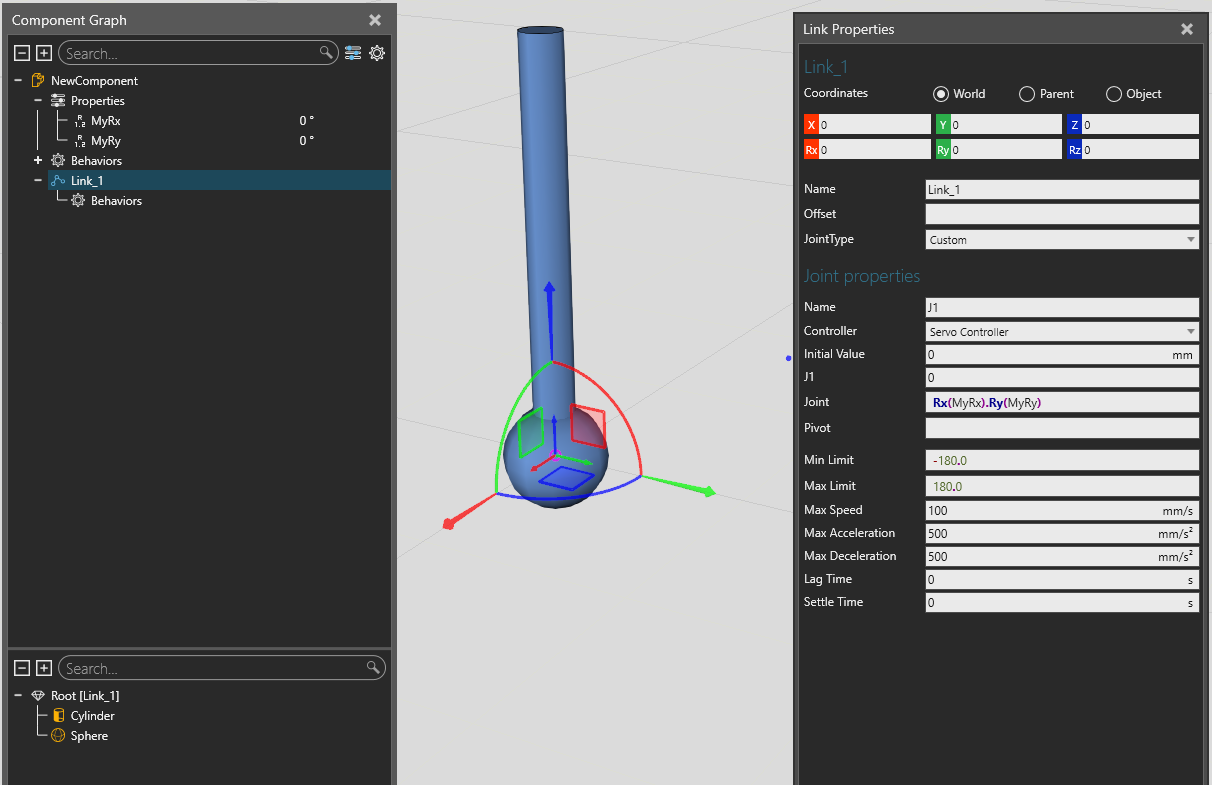
This is the most simple example. Gimbal or Ball has two DOFs in this case, Rx and Ry. Set that up with the custom joint definition and drive the values based on other joint values or like in this example, with individual (Real, Angle) properties.
Jogging is pretty difficult (or impossible). JogInfo behaviour is needed in that link that sets the MyRx or MyRy property values, but only one can be set with one JogInfo.
1 Like